
富士山本八合目山小屋のカレー ― 2012年07月08日 20時52分03秒
富士山本八合目の山小屋での夕食。定番のカレーだそうですがなんと「ハンバーグ付」の豪華なカレーです。

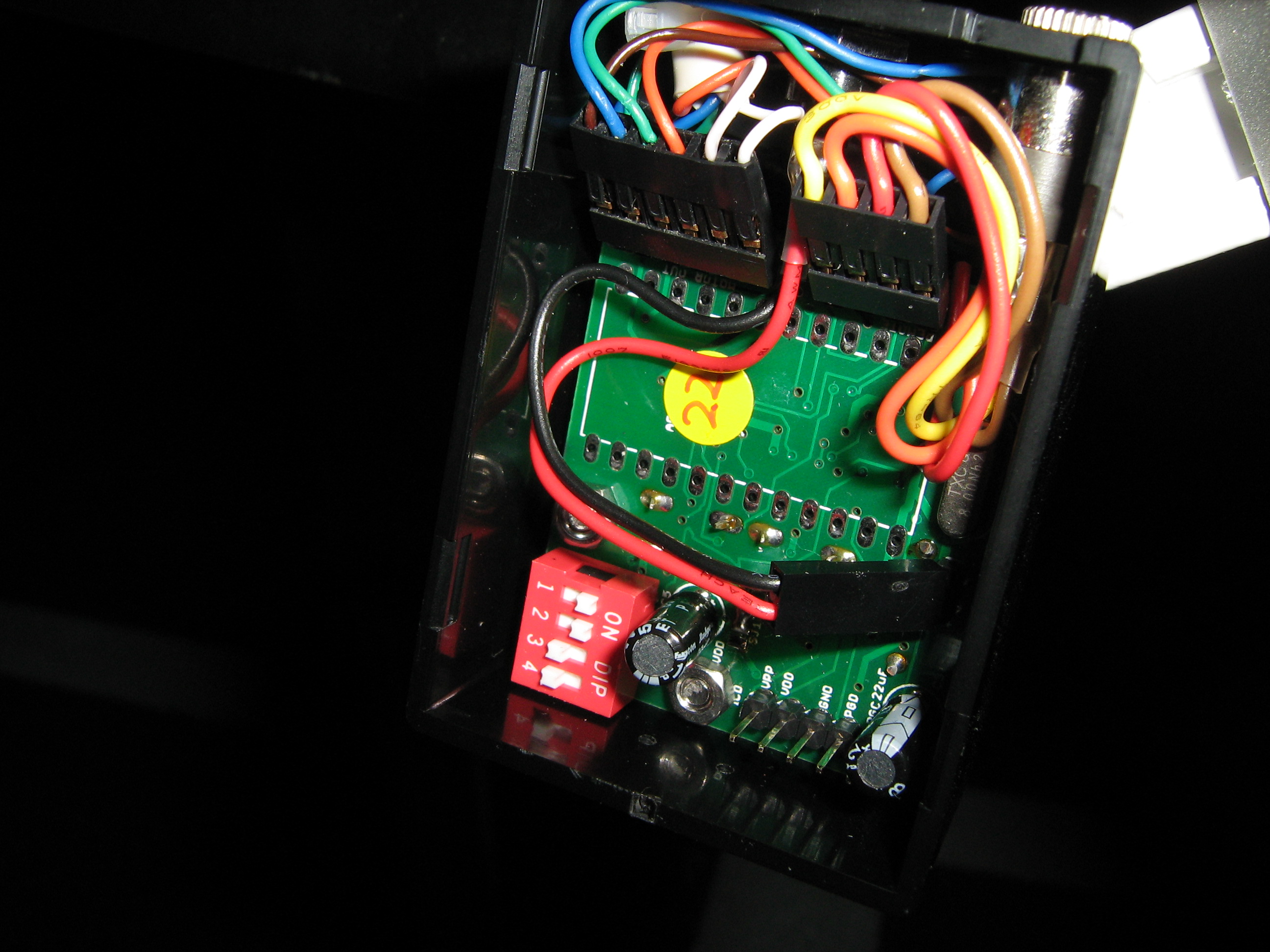
自作MT-1用コントローラのGP赤道儀とC8での実機テスト ― 2012年07月31日 23時09分50秒
もともとは五藤光学MARK-X赤道儀用のモータードライブコントローラの開発が目的だったのですが、応用としてビクセンのMD-5モータおよびMT-1モータへの対応も行いました。
MD-5モータは仕様的に五藤光学などで採用しているステッピングモータの仕様とほとんど同じため、電源容量やトランジスタアレイの能力、モーターへの供給電源は同じ設計で動作させることができます。
MARK-X赤道儀のモータの相単位のコイル抵抗は100Ω~140Ωのモデルを確認しています。
MD-5モータは同様に100Ωです。
しかしながらMT-1モータはコイル抵抗が20Ωです。これは小型天体望遠鏡用のモータードライブで使うステッピングモータとしては異常に低抵抗設計であり、提供元の日本パルスモータの型番仕様としては「定電流駆動」モデルになっています。
300mA程度の電流を流す設計で内蔵のギアもMD-5の1/300から1/120になっています。
ギア比だけを見るとトルクは落ちるためその分のトルク不足を電流を多く流すことで補う目的と脱調しない範囲でのより高速回転を目指すためだったと思われます。
MD-5モータは仕様的に五藤光学などで採用しているステッピングモータの仕様とほとんど同じため、電源容量やトランジスタアレイの能力、モーターへの供給電源は同じ設計で動作させることができます。
MARK-X赤道儀のモータの相単位のコイル抵抗は100Ω~140Ωのモデルを確認しています。
MD-5モータは同様に100Ωです。
しかしながらMT-1モータはコイル抵抗が20Ωです。これは小型天体望遠鏡用のモータードライブで使うステッピングモータとしては異常に低抵抗設計であり、提供元の日本パルスモータの型番仕様としては「定電流駆動」モデルになっています。
300mA程度の電流を流す設計で内蔵のギアもMD-5の1/300から1/120になっています。
ギア比だけを見るとトルクは落ちるためその分のトルク不足を電流を多く流すことで補う目的と脱調しない範囲でのより高速回転を目指すためだったと思われます。
一般的な小型のモータードライブの回路構成を考えると従来のモデルの場合は電源電圧をそのままモータに供給することが出来るため電圧変換などを行う部品を経由することがなく、部品の発熱の問題や容量の問題は発生しません。
一方でMT-1モータに従来と同じように12Vなどの電圧を印加するとモータに電流が流れすぎてしまい、トランジスタアレイやモータが壊れる原因となります。
そこで3端子レギュレータで電圧を落として5Vや3Vの一定の電圧をモータに供給するか、定電流回路を組んで一定の電流を供給する設計を行うことになります。
このようにすると回路を構成する素子にモータに供給するための300mAなどの電流が流れることになり、従来は発熱することがなかったコントローラ基板上の部品が発熱することになります。
今回以下の二通りを実験しました。
1.もともとPICマイコン用に使っている5V変換用3端子レギュレータの容量を500mAのものから1Aに増強して5Vをモータの電源として供給するように回路を変更する。
2.従来方式の通り電源電圧をそのままモータ電源として使うが電流が流れすぎないように直列に抵抗を挿入する
1.の方式の場合、駆動そのものは問題ないのですが3端子レギュレータの発熱が非常に大きく、80℃以上の温度になりケース表面に出ているビスなどが触れないほど発熱することが確認できました。これでは実際に使うことは現実的ではありません。但し、電源電圧を9Vにすると3端子レギュレータの発熱は50℃程度だということが分かり電源電圧を12Vから9Vにすれば実用的になることがわかりましたが、個人的には12V電源が使えるほうが便利なのでこの方式での対応は却下しました。
2.の方式の場合、直列に接続した抵抗の発熱が大きいことが分かりました。51Ωの抵抗だと70℃以上の温度になることが確認できました。駆動トルク的には12V電源の時に抵抗値が20Ω+51Ω=71ΩとなりI=V/R=169mA流すことが出来、トルク的にも十分だと考えたのですがこれも却下です。
2.の方式でも直列につなぐ抵抗値として100Ωとすると電流値は12V電圧の時に100mAとなり発熱も50℃程度で実用になりました。問題は実際に追尾するトルクが得られているかということです。
そこで実際に重めの鏡筒であるC8をGP赤道儀に搭載して追尾テストを行いました。
結論としては16倍速での増速も含めて駆動トルクに実用上の問題は見られませんでした。
そこで3端子レギュレータで電圧を落として5Vや3Vの一定の電圧をモータに供給するか、定電流回路を組んで一定の電流を供給する設計を行うことになります。
このようにすると回路を構成する素子にモータに供給するための300mAなどの電流が流れることになり、従来は発熱することがなかったコントローラ基板上の部品が発熱することになります。
今回以下の二通りを実験しました。
1.もともとPICマイコン用に使っている5V変換用3端子レギュレータの容量を500mAのものから1Aに増強して5Vをモータの電源として供給するように回路を変更する。
2.従来方式の通り電源電圧をそのままモータ電源として使うが電流が流れすぎないように直列に抵抗を挿入する
1.の方式の場合、駆動そのものは問題ないのですが3端子レギュレータの発熱が非常に大きく、80℃以上の温度になりケース表面に出ているビスなどが触れないほど発熱することが確認できました。これでは実際に使うことは現実的ではありません。但し、電源電圧を9Vにすると3端子レギュレータの発熱は50℃程度だということが分かり電源電圧を12Vから9Vにすれば実用的になることがわかりましたが、個人的には12V電源が使えるほうが便利なのでこの方式での対応は却下しました。
2.の方式の場合、直列に接続した抵抗の発熱が大きいことが分かりました。51Ωの抵抗だと70℃以上の温度になることが確認できました。駆動トルク的には12V電源の時に抵抗値が20Ω+51Ω=71ΩとなりI=V/R=169mA流すことが出来、トルク的にも十分だと考えたのですがこれも却下です。
2.の方式でも直列につなぐ抵抗値として100Ωとすると電流値は12V電圧の時に100mAとなり発熱も50℃程度で実用になりました。問題は実際に追尾するトルクが得られているかということです。
そこで実際に重めの鏡筒であるC8をGP赤道儀に搭載して追尾テストを行いました。
結論としては16倍速での増速も含めて駆動トルクに実用上の問題は見られませんでした。

月時駆動のためにモードスイッチを「3」に設定。

月しか見えていないので月をレデューサをつけて直焦点で撮影してみる。


最近のコメント