
多目的モータードライブコントローラの簡略操作説明 ― 2012年08月08日 08時52分51秒
■概要
PICマイコンを使ったモータードライブコントローラの簡略版操作説明です。
各社のPM型ユニポーラステッピングモータを使ったモータードライブのコントローラとして使用可能です。
単体コントローラの場合、五藤光学のDIN5ピン仕様、ビクセンのDIN5ピン仕様、ビクセンのDIN8ピン仕様に標準対応できます。その他の仕様でも適宜対応可能です。
■電源
以下はコントローラ内蔵一体型のMARK-X用モータードライブのDCジャック部分です。
PICマイコンを使ったモータードライブコントローラの簡略版操作説明です。
各社のPM型ユニポーラステッピングモータを使ったモータードライブのコントローラとして使用可能です。
単体コントローラの場合、五藤光学のDIN5ピン仕様、ビクセンのDIN5ピン仕様、ビクセンのDIN8ピン仕様に標準対応できます。その他の仕様でも適宜対応可能です。
■電源
以下はコントローラ内蔵一体型のMARK-X用モータードライブのDCジャック部分です。

電源電圧は直流12V供給が基本です。
9Vでも動作しますが、増速時にトルクが足りずに脱調する場合があります。
逆に言えば12V以上の電圧、例えば15V供給すればトルクが上がるということになります。
但し、最大でも15V程度を推奨します。
トルク重視ならば12V~15V供給。乾電池駆動で増速操作はせずに写真撮影だけ行うのであれば9V供給というように使い分けることができます。
冬場でトルクが心配ならば15V供給で常用するというようなことは可能です。
■消費電流と発熱
以下、電源電圧が12Vで恒星時駆動の場合の消費電流の目安です。
LEDとPICマイコンの消費電流は加味しておりません。
MT-1用のコントローラは電流制限用の抵抗を接続していますのでケースの発熱が多めになっていますが触れないほど熱くはなりません。それ以外の単体コントローラは電流制限用の抵抗は接続していないため発熱はほとんどありません。
MT-1用コントローラの相単位の電流制限用抵抗値はType1の場合100Ω、Type2の場合75Ωです。
モータ本体の相抵抗が20Ωですので総合的な抵抗値はType1で120Ω、Type2で95Ωです。
これにより相当たりの消費電流はType1で100mA、Type2で126mAとなります。1-2相励磁でのトータルの消費電流はこの値を1.5倍してください。
特に断りのない限りType1でご提供しております。
※(2014年4月28日追記)
MT-1用のコントローラは電流制限用抵抗器を取り付けて提供していましたが、今後はUSB経由での5V電源供給を標準とします。このコントローラでの駆動電圧範囲は5V~9Vとします。5V電源時の相当たりの消費電流は250mAです。このコントローラではモーターの発熱は高くなりますが、コントローラの発熱はほとんどありません。9Vでの消費電流は450mAとなります。12Vでも動作しますが消費電流は600mAとなり、トランジスタアレイの定格最大電流である500mAを超えますので壊れる可能性があります。
ビクセンMD-5用コントローラの消費電流は1相当たり120mAで1-2相励磁トータルで180mA程度です。MD-5で使用されているモータの相当たりの抵抗値が100Ωであることから導き出されます。
五藤光学MARK-X赤道儀用のコントローラの場合は純正モータの仕様により相当たり120mA、1-2相励磁トータルで180mA程度の場合と相当たり85.7mA、1-2相励磁トータルで130mA程度の場合があります。
コメットトラッカーセット品のモータの場合には消費電流が多めになる相抵抗100Ωの仕様のモータが使われています。P型モータードライブとのセット品のモータの相抵抗は140Ωです。
五藤光学MARK-X用の一体型モータードライブの場合は150mA程度の消費電流です。
本コントローラの回路設計上は電源電圧に比例して消費電流が多くなり結果としてトルクも高くなります。
■スイッチ
コントローラには以下のスイッチがあります。
・DIPスイッチ
・FASTスイッチ
・STOPスイッチ
FASTスイッチとSTOPスイッチの機能は以下のようにリモートスイッチ用ジャックにも出ています。
MT-1用のコントローラは電流制限用抵抗器を取り付けて提供していましたが、今後はUSB経由での5V電源供給を標準とします。このコントローラでの駆動電圧範囲は5V~9Vとします。5V電源時の相当たりの消費電流は250mAです。このコントローラではモーターの発熱は高くなりますが、コントローラの発熱はほとんどありません。9Vでの消費電流は450mAとなります。12Vでも動作しますが消費電流は600mAとなり、トランジスタアレイの定格最大電流である500mAを超えますので壊れる可能性があります。
ビクセンMD-5用コントローラの消費電流は1相当たり120mAで1-2相励磁トータルで180mA程度です。MD-5で使用されているモータの相当たりの抵抗値が100Ωであることから導き出されます。
五藤光学MARK-X赤道儀用のコントローラの場合は純正モータの仕様により相当たり120mA、1-2相励磁トータルで180mA程度の場合と相当たり85.7mA、1-2相励磁トータルで130mA程度の場合があります。
コメットトラッカーセット品のモータの場合には消費電流が多めになる相抵抗100Ωの仕様のモータが使われています。P型モータードライブとのセット品のモータの相抵抗は140Ωです。
五藤光学MARK-X用の一体型モータードライブの場合は150mA程度の消費電流です。
本コントローラの回路設計上は電源電圧に比例して消費電流が多くなり結果としてトルクも高くなります。
■スイッチ
コントローラには以下のスイッチがあります。
・DIPスイッチ
・FASTスイッチ
・STOPスイッチ
FASTスイッチとSTOPスイッチの機能は以下のようにリモートスイッチ用ジャックにも出ています。


以下のようにキヤノンのリモートスイッチをつなぐことができます。半押しでFASTで、全押しでSTOP操作になります。工作すればオートガイダー対応も可能です。

以下は本体のFASTスイッチとSTOPスイッチを含む各部の名称です。スイッチの色はケースの色と製造時の都合により変わります。
独立したコントローラの場合、DIPスイッチはケース内部の基板上にありますのでケースのふたを開けて設定変更する必要があります。
基板上にあるPICマイコン用のプログラム書き換え用コネクタにPICKit2などを接続することによりプログラム書き換えやEEPROMの設定値の変更が可能です。
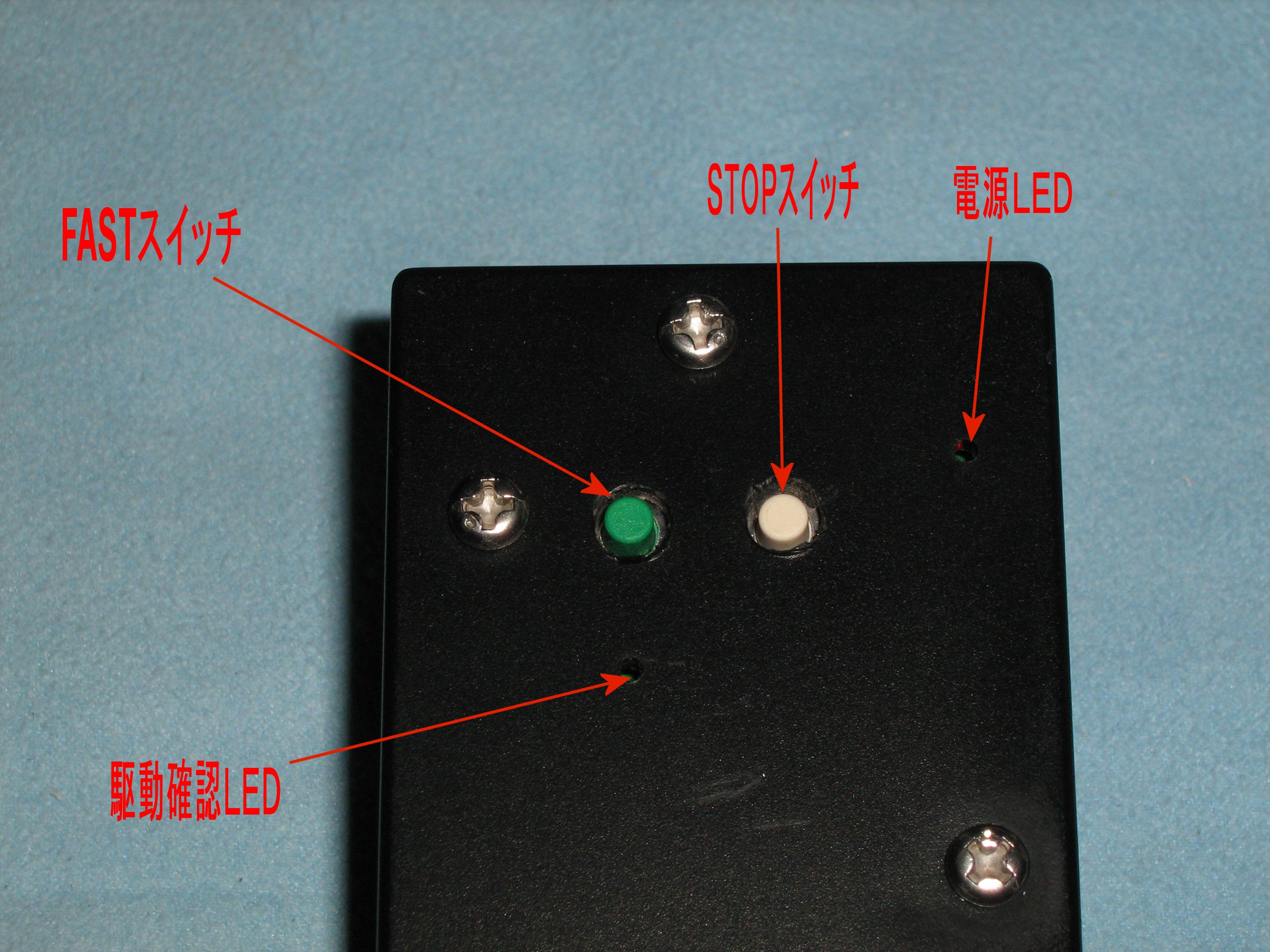


FASTスイッチを押すと追尾方向に正転で増速します。最初は恒星時比2倍速で正転し、時間経過とともに増速します。最大速度は五藤光学純正モータで最大4倍速、ビクセン製MT-1で最大16倍速、その他モータでは最大8倍速です。
STOP スイッチは最初は停止操作ですが、時間経過とともに恒星時比1倍速逆転、2倍速逆転というように増速逆転します。五藤光学製 純正モータで最大2倍速逆転、ビクセン製MT-1モータで最大8倍速逆転。その他モータでは最大4倍速で逆転します。
STOPスイッチの最大速はFASTスイッチより1段階落としてあります。
なお、FASTスイッチとSTOPスイッチの両方が押されている場合はSTOPスイッチが押されているものとして動作します。
モードスイッチが3(月時モード),6(コメットトラッカーモード),7(赤緯コメットトラッカーモード)の時にFASTスイッチとSTOPスイッチを押したまま電源投入することにより各モードの恒星時比設定を初期設定に戻すことができます。
■動作モード
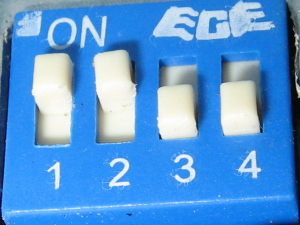
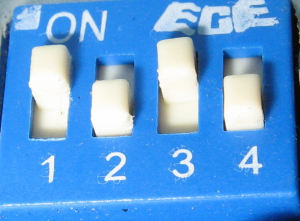
DIPスイッチの意味は以下です
製造時の都合でDIPスイッチの部品が異なる場合があります。

モード0
恒星時追尾設定

モード1
キングスレート追尾設定(恒星時比99.97%駆動)
キングスレート追尾設定(恒星時比99.97%駆動)

モード2
平均太陽時追尾設定(恒星時比99.73%駆動)
平均太陽時追尾設定(恒星時比99.73%駆動)

モード3
月時モード設定
初期ソフトウェア(2012年6月以前リリース)では平均月時(恒星時比96.35%)のみですが最新ソフトウェア(2012年7月リリース以降)では可変速制御(恒星時比95.4%~97.11%可変:初期値は96.35%)を行います。
可変速制御が可能なソフトウェアでは初期状態は平均月時設定である96.35%で駆動しますが、FASTスイッチを押すと恒星時比0.01%増速し、STOPスイッチを押すと恒星時比0.01%減速します。変更された恒星時比の値はEEPROMに記憶されて電源OFFしても消えません。
月時モード設定
初期ソフトウェア(2012年6月以前リリース)では平均月時(恒星時比96.35%)のみですが最新ソフトウェア(2012年7月リリース以降)では可変速制御(恒星時比95.4%~97.11%可変:初期値は96.35%)を行います。
可変速制御が可能なソフトウェアでは初期状態は平均月時設定である96.35%で駆動しますが、FASTスイッチを押すと恒星時比0.01%増速し、STOPスイッチを押すと恒星時比0.01%減速します。変更された恒星時比の値はEEPROMに記憶されて電源OFFしても消えません。
モード4
星景モード設定(恒星時比60%駆動)

モード5
赤緯モード設定
FASTスイッチとSTOPスイッチを押さない限りは駆動しません。
FASTスイッチを押すと正転で恒星時比2倍で駆動してSTOPスイッチを押すと逆転で恒星時比2倍で駆動します。
五藤光学純正モータ用のコントローラの場合は最大で4倍速まで増速します。ビクセン製MT-1モータ用のコントローラの場合は最大で16倍速まで増速します。それ以外のモータの場合は最大8倍速まで増速します。
モード6
コメットトラッカーモード設定
初期状態では恒星時駆動を行いますがFASTスイッチを押すと恒星時比0.01%増速し、STOPスイッチを押すと恒星時比0.01%減速します。変更された恒星時比の値はEEPROMに記憶されて電源OFFしても消えません。
なお、この機能は初期ソフトウェアでは対応しておりません。

モード7
赤緯コメットトラッカーモード設定
初期状態では恒星時比0.00%で設定されており駆動しませんが、FASTスイッチを押すと恒星時比0.01%増速し、STOPスイッチを押すと恒星時比0.01%減速します。変更された恒星時比の値はEEPROMに記憶されて電源OFFしても消えません。
なお、この機能は初期ソフトウェアでは対応しておりません。

ビクセン製モーターをMARK-Xに取り付ける ― 2012年04月08日 23時57分10秒
モータードライブの工作で一番難しいのは実は適当なモータの調達だったりします。MARK-X用として使えるパルスモーターは現在個人での調達が困難になっています。そこで他社の入手可能なモータを使うことを試して見ます。
一番入手しやすいのはビクセン製です。
幸いなことにモータの取り付け穴の間隔、サイズはMARK-Xで使われているものと同じなので、流用可能ですが、分解して取り出して流用するよりも買って来て少しの改造で流用できた方が楽です。
ということで、取り付け方法だけ試してみます。コントローラはもちろん自作品を想定しているので5ピンのモータだろうが8ピンの現行品のMT-1だろうがどちらにも対応できます。
用意したのはMT-1ではなくSP赤道儀の時代のMD-5用のモータです。ギア比が1/300の日本パルスモーター製のモータです。コントローラ的にもこのモータが一番相性が良いです。
※2015年7月18日追記:内蔵ギアの遊びが大きく「カタカタ」音が目立ちますのでその点は納得して使う必要があります。
3mm厚で15mm幅のアルミ板がホームセンターで簡単に手に入ります。これを45mm~47mmの長さで大まかに切断したものを用意して36mm間隔の3.2Φ~3.5Φの穴と8.1Φの穴を開けます。この金具の工作がこの方法での一番難しいところ.

この金具は自作の一体型モータードライブで使っているものと同じ仕様のものです。

以下はMD-5用のモーターです。オークションで入手したもの。モーターのサイズとか取り付け穴の位置は上記と実は同じです。MT-1も外形寸法などの仕様は同じです。

ちなみに、日本パルスモーター製の以下のモータです。MT-1はこれとは違う仕様です。任意に設定できるコントローラを作ったのでどちらにも対応できます。

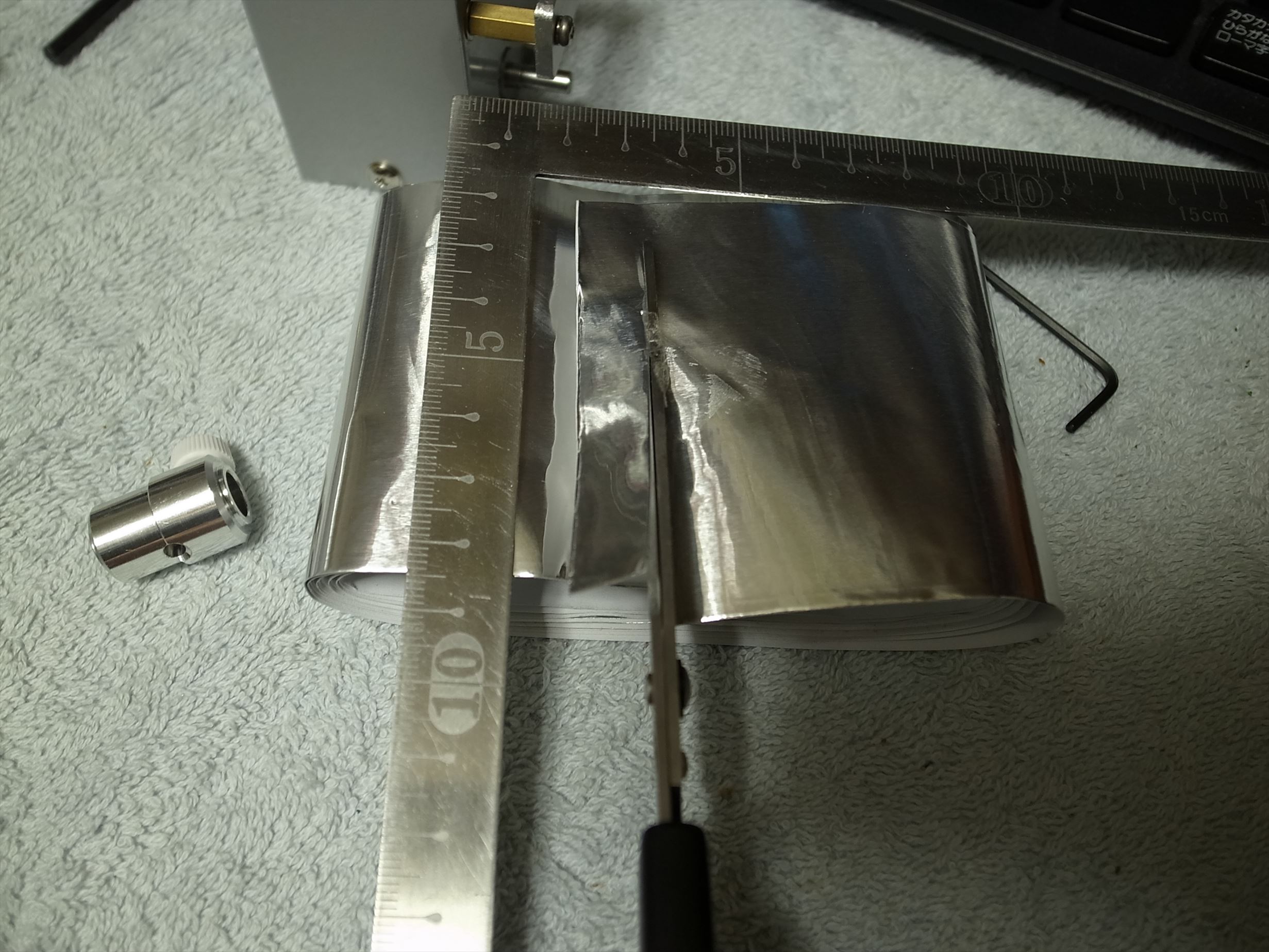
スペーサを介して回転止め用の金具を取り付けます。モーターの軸には6Φ~8Φの異径インラインカラーを取り付けます。もともとはイモビスでの取り付けですが、MARK-Xの軸側はキャップスクリューに交換しています。但し、モーターのギア出力の軸の直径は5Φですのでテープを巻くなど1mmの差を埋めないと偏心が大きくなります。
強度や経年劣化、入手性を考えると単なる「紙」をモータの出力軸に巻いて特に接着せずにその上から異径インラインカラーの6φ側を装着するのが良いと思います。
強度や経年劣化、入手性を考えると単なる「紙」をモータの出力軸に巻いて特に接着せずにその上から異径インラインカラーの6φ側を装着するのが良いと思います。

※2015年7月20日追記:紙を巻く方法を当初お勧めしましたが百均で手に入るキッチン用のアルミテープの方が確実で良いかもしれません。以下は自作の一体型モータードライブですが、モータの中身はビクセンのMD-5と同じスペックの日本パルスモータ製ですので軸径は同じ5Φです。


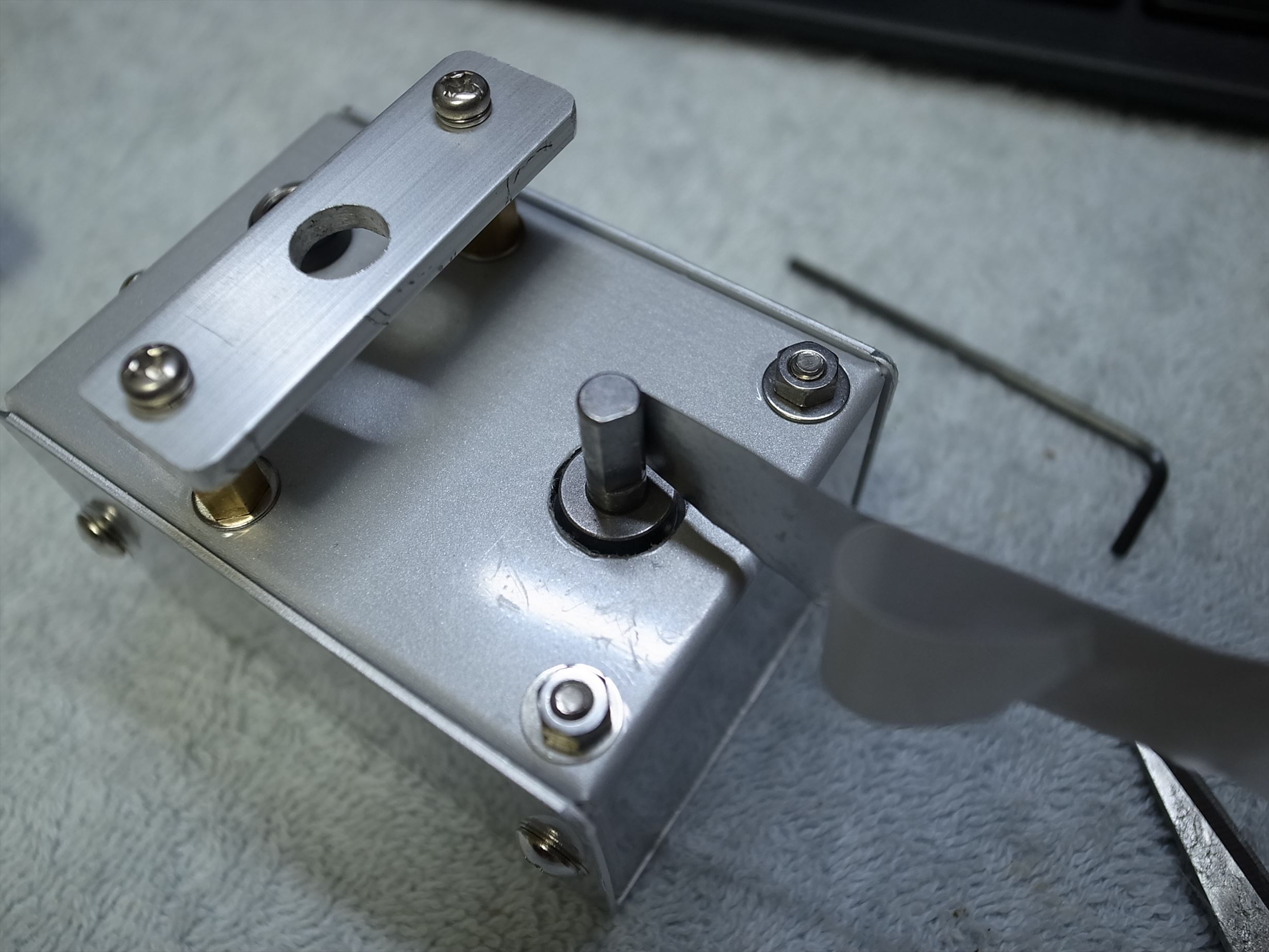


MARK-Xベースモデルに取り付けたところ。スペーサの手持ちがなかったので長いものを使っているのですが、本当は15mm長のものが最適だと思います。

回転止めピンは市販品のスペーサを組み合わせたもので、純正品とは違いますが、目的は達せられます。

あとはコントローラを用意するだけです。
MARK-X用自作モータードライブコントローラ応用設定2:ケンコーβプラズマ対応 ― 2011年12月10日 09時46分57秒
MARK-X用の自作モータードライブコントローラの応用設定その2です。
今回はケンコーβプラズマ用。
今回はケンコーβプラズマ用。

・ウォームホイル歯数:144枚
・ギアードモータ減速比:1/500
・パルスモーターはなぜかMARK-Xと同じタイプ
・水晶発振周波数実測値:約8.000647MHz
・モータータイプ:0(平ギア反転)



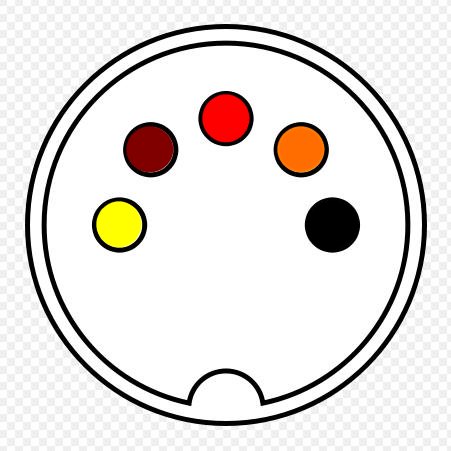
なお、ケンコーβプラズマのモータ側のジャックはDIN5ピンでビクセンMD-5と同じですが、ピンアサインが違いますので配線の変更も必要です。
赤:電源コモン
黄色:B
黒:B/
白:A
青:A/
図は外側から見た時のピンアサインです。
オリジナルは赤の部分に電源電圧が出力されますので外側の通常シールドとして使う部分に電圧が出力されていて危険です。
シールド線に電源をつないでいるからこのようになるのですが、できれば改造してモータ側の電源コモンの配線をDINジャックの中央のピンに集中させた結線になるように改造した方が良いでしょう。
(ビクセンMD-5はこのようになっています)

ちなみに、ビクセンMD-5のピンアサインは以下です。
赤:電源コモン
黄色:A/
茶色:B/
橙:A
黒:B
なお、日本パルスモーター製の少なくともギア内蔵タイプのステッピングモータは他のステッピングモータとA相とB相が逆になっていますのでここで示しているピンアサインはメーカ指定のモーターの配線の色と相の対応付を逆にしています。
黄色:A/
茶色:B/
橙:A
黒:B
なお、日本パルスモーター製の少なくともギア内蔵タイプのステッピングモータは他のステッピングモータとA相とB相が逆になっていますのでここで示しているピンアサインはメーカ指定のモーターの配線の色と相の対応付を逆にしています。
MARK-X赤道儀のウォームギア調整 ― 2011年11月23日 23時27分47秒
自作のモータードライブの開発のついでにMARK-Xのウォームギアの調整の仕方を取り上げます。
オークションで手に入れる人も多く、適切な状態で使用されていない場合に調整が狂っている場合を想定しています。
基本的には各社モータードライブにも同じ問題があります。
但し、モータードライブ内蔵の機種の場合、ここで書くことは余り適用できないとは思います。
なお、ここで書くことの実践は自己責任でやってください。調整する前より悪くなった時に最悪メーカにオーバーホールに出す位の覚悟を持ってください。
想定問題:正常に追尾が出来ない
オークションで手に入れる人も多く、適切な状態で使用されていない場合に調整が狂っている場合を想定しています。
基本的には各社モータードライブにも同じ問題があります。
但し、モータードライブ内蔵の機種の場合、ここで書くことは余り適用できないとは思います。
なお、ここで書くことの実践は自己責任でやってください。調整する前より悪くなった時に最悪メーカにオーバーホールに出す位の覚悟を持ってください。
想定問題:正常に追尾が出来ない
モータードライブが故障しているのかどうか、まともに駆動しているのかどうかの切り分けはまずは制御物の末端から確認します。つまりこの場合はMARK-X赤道儀のウォームギアです。
ウォーム軸を手で回してみます。この時、クランプは締め付けておきます。手で回せないような状態ならそもそもモータードライブでも回せません。手で回せないような状態でモータードライブを使わないでください。故障します。

手で回してみて均一に回せるようであれば特に調整の必要はありません。力の入れ加減というか「きつさ加減」が変るようであれば調整した方がいいかもしれません。
必要な工具はプラスドライバ、マイナス精密ドライバ、10番のスパナ。写真にはありませんが、モンキースパナかプライヤでも構いません。

ケース1:全く手ではウォーム軸を回せない
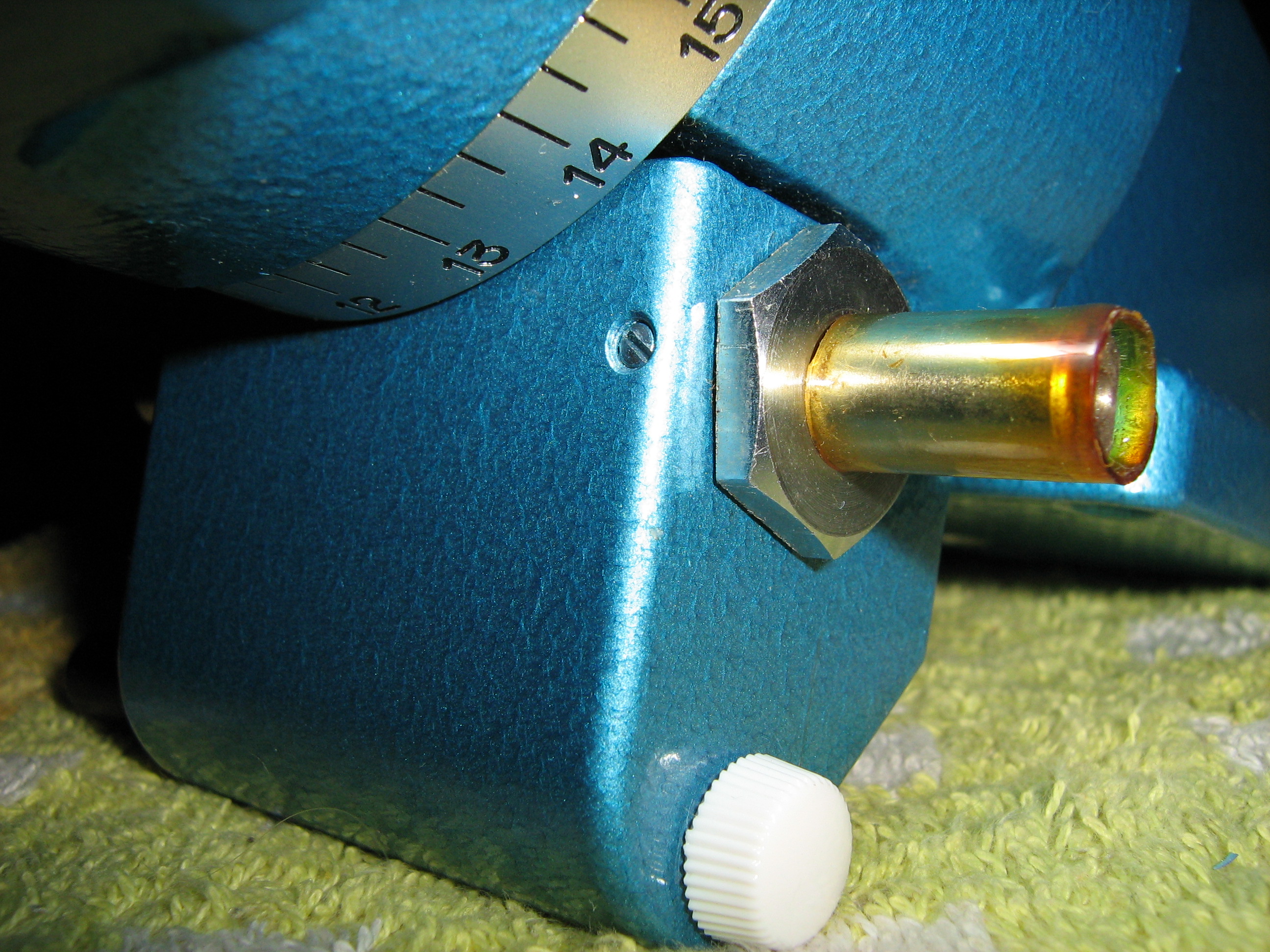
ウォーム軸部分を全てとりはすします。まず、大き目のナットがありますが、これをスパナで緩めます。次に真ん中のプラスネジをはずすとウォーム軸全体が取り外せます。ギアを痛めないようにクランプは緩めてから作業を行ってください。


取り外した状態が以下です。


チェックその1
ウォーム軸をはずした状態でクランプを締めて手で極軸(または赤緯軸)を回してみます。回らなければ元に戻してオーバーホールを依頼してください。自分では対応出来ません。
チェックその2
取り外したウォーム軸を手で回してみてください。回らなかったりきついようであればこの部分にまずは問題があります。ウォーム軸の調整のためにイモビスを緩めます。イモビスは以下の写真で示す位置にありますが、ロットによっては反対側にもあります。調整に必要なのは以下の写真で示すイモビスです。

大き目のスパナがあればいいのですがなければ以下の写真のようにプライヤで緩めます。必ずイモビスを緩めてからやってください。緩めてウォーム軸が回るようになれば左右にがたつきが出ない程度の位置で固定します。位置を決めたらイモビスを締め付けます。

以上のチェック以外でウォーム軸が回せないケースはウォーム軸とウォームホイルが全く遊びがない状況で接触していることが原因です。調整の仕方は次のケース2の調整と共通です。
ケース2:ウォーム軸が滑らかに回せない、きつい
ウォームホイルとウォーム軸のクリアランスと傾きの調整をします。
まずは役割を理解します。完全に分解する必要はありません。説明のために完全に分解しました。
以下のナットは最終的な固定のためのものです。調整時には緩めるだけで構いません。このナットは調整機構を担っていません。

ウォーム軸部分の真ん中のプラスネジ(以下の写真では左端)は引きネジでの固定の役目です。クリアランスや傾きの調整は2本のイモビスの役割になります。

調整その1:回転がきつい場合
真ん中のプラスネジを少し多めに緩めて、イモビスを左右均等量だけ締め付けます。これでウォーム軸とウォームホイルの遊びが増えます。この状態で再度真ん中のプラスネジを締め付けてウォーム軸を回してみます。ムラがあるようならウォームホイルとウォーム軸が垂直に接していないことを示しています。
調整その2:回転がゆるすぎてクランプを締めて手で極軸(または赤緯軸)を回すとガタガタが多い場合
遊びが多すぎるので真ん中のプラスネジを軽く緩めてイモビスも均等に緩める方向に回して再度真ん中のプラスネジを締め付けます。最初にプラスネジを緩めるのはイモビスを緩めるための精密ドライバの力を弱めるためです。
調整その3:回転にムラがある場合
真ん中のプラスネジを軽く緩めて、二つのイモビスの片方を緩めて片方を締め付けます。締め付ける方がウォームホイルから離れて緩めるほうがウォームホイルに接近します。調整するたびにプラスネジで締め付けて手で回す感触を確かめる必要があるので地道な作業になります。
適当な状態になったら最終的には2個のナットを締め付けて感触を確かめます。問題なければここで終わりです。
MARK-X用自作モータードライブ応用設定 ― 2011年11月20日 23時53分46秒
五藤光学のMARK-X赤道儀用の自作モータードライブですが、ソフトウェアの構成としては汎用的に設計、実装しました。
赤道儀のモータードライブは要はギアの減速比と使用するモーターの減速比、パルスモータのパルス数に依存するだけです。
なので、減速比に応じた分周処理をマイコンで処理するだけで、その設定は任意にすることが可能です。プログラム固定で行ってもビルドし直すことを考えればソースプログラムの定義マクロ値のみを修正すればいいのですが、今回はそれすら行わなくてもいいように設計しました。
すなわち、EEPROMでタイマカウンタを設定してそれを読み取って処理するというやり方です。
また、対象とするモータの種類としてMARK-X赤道儀の純正のモータをコントローラ単体として使用する場合をMOTOR TYPE=0、ギアードパルスモータで直接的に駆動する方法をMOTOR TYPE=1として大雑把に言えば2種類の制御が行えるようにしました。MOTOR TYPE=0とMOTOR TYPE=1では回転方向が逆になります。
赤道儀のモータードライブは要はギアの減速比と使用するモーターの減速比、パルスモータのパルス数に依存するだけです。
なので、減速比に応じた分周処理をマイコンで処理するだけで、その設定は任意にすることが可能です。プログラム固定で行ってもビルドし直すことを考えればソースプログラムの定義マクロ値のみを修正すればいいのですが、今回はそれすら行わなくてもいいように設計しました。
すなわち、EEPROMでタイマカウンタを設定してそれを読み取って処理するというやり方です。
また、対象とするモータの種類としてMARK-X赤道儀の純正のモータをコントローラ単体として使用する場合をMOTOR TYPE=0、ギアードパルスモータで直接的に駆動する方法をMOTOR TYPE=1として大雑把に言えば2種類の制御が行えるようにしました。MOTOR TYPE=0とMOTOR TYPE=1では回転方向が逆になります。
別の言い方ではMOTOR TYPE=0は平ギアの介在により回転方向が反転する接続方式で、MOTOR TYPE=1はモーターの軸をそのままウォーム軸(微動ハンドルを取り付ける軸)に接続するやり方です。
MOTOR TYPE設定、プリスケーラ設定、モード毎のタイマカウンタ値のすべてをEEPROM設定を介して行います。
※2012年8月追記(2015年7月18日修正):2012年7月以降のソフトウェアではモード毎のタイマカウンタ値に加えてコメットトラッカーと月時モード時の可変設定のための正規化した比率値を設定しています。
以下、確認、設定方法を示します。
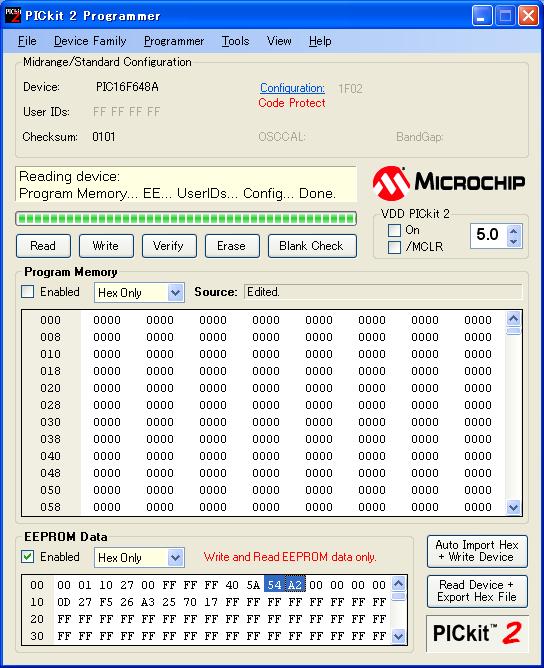
以下はPicKit2をMOTOR TYPE=1のモータードライブに接続したところ

以下はPicKit2プログラマを接続後に起動した初期状態

「Read」をクリックして書き込み済みのプログラムとEEPROMの状態を読み込んだ状態。プログラム部分はプロテクト設定で書き込んでいるため全て0に見えます。

以下のようにEEPROMにはデータが配置されています。
以下ではMOTOR TYPE=1に設定されていて、プリスケーラは0(1/1)、MOTOR TYPE=1でのタイマカウンタ値が16進でB984という値に設定されていることを示します。この個体では水晶発振子の実測値は8.000582MHzとなっています。

EEPROMの設定を変えるためには最初に「Program Memory」の「Enabled」のチェックをはずします。チェックをしたままで「Write」を行うとプログラムも壊れます。

それでは実際にタイマカウンタ値を変更してみます。
MARK-X用のモータードライブですがNikonの赤道儀用に設定値を変更してみます。MARK-Xのウォームホイルは歯数126枚ですが、Nikonの6.5cm赤道儀のウォームホイルの歯数は144枚とのことです。B984という値をA254に変更します。
「Write」を押すとEEPROMに書き込みを行います。くどいようですが、「Program Memory」の「Enabled」部分のチェックははずしておきます。

MARK-X用の設定からNikon用への変更はたったのこれだけです。
ウォームホイル歯数144枚はビクセンも同様ですのでビクセン、ニコン向対応はほぼ同じようなものになります。
以下にEXCELでの計算状況を示します。

最近のコメント