
モータードライブ出荷調整 ― 2011年11月04日 04時27分19秒
MARK-X用のモータードライブコントローラとモータードライブですが、基板や部品を自分が使う以上に入手したため、オークション経由で販売することにしました。
1台ずつ調整した上で、実測値を内部にシールを貼ることにしました。最初はケースのフタなどに貼っていたのですが複数台並行作業中に分からなくなってしまうので、モータまたはケースの基板側に貼ることにしました。
以下は8MHzの水晶でのモーター一体型での1相周波数測定状態。
5.26476Hzです。期待値より少し周波数が高い。
以下は8MHzの水晶でのモーター一体型での1相周波数測定状態。
5.26476Hzです。期待値より少し周波数が高い。

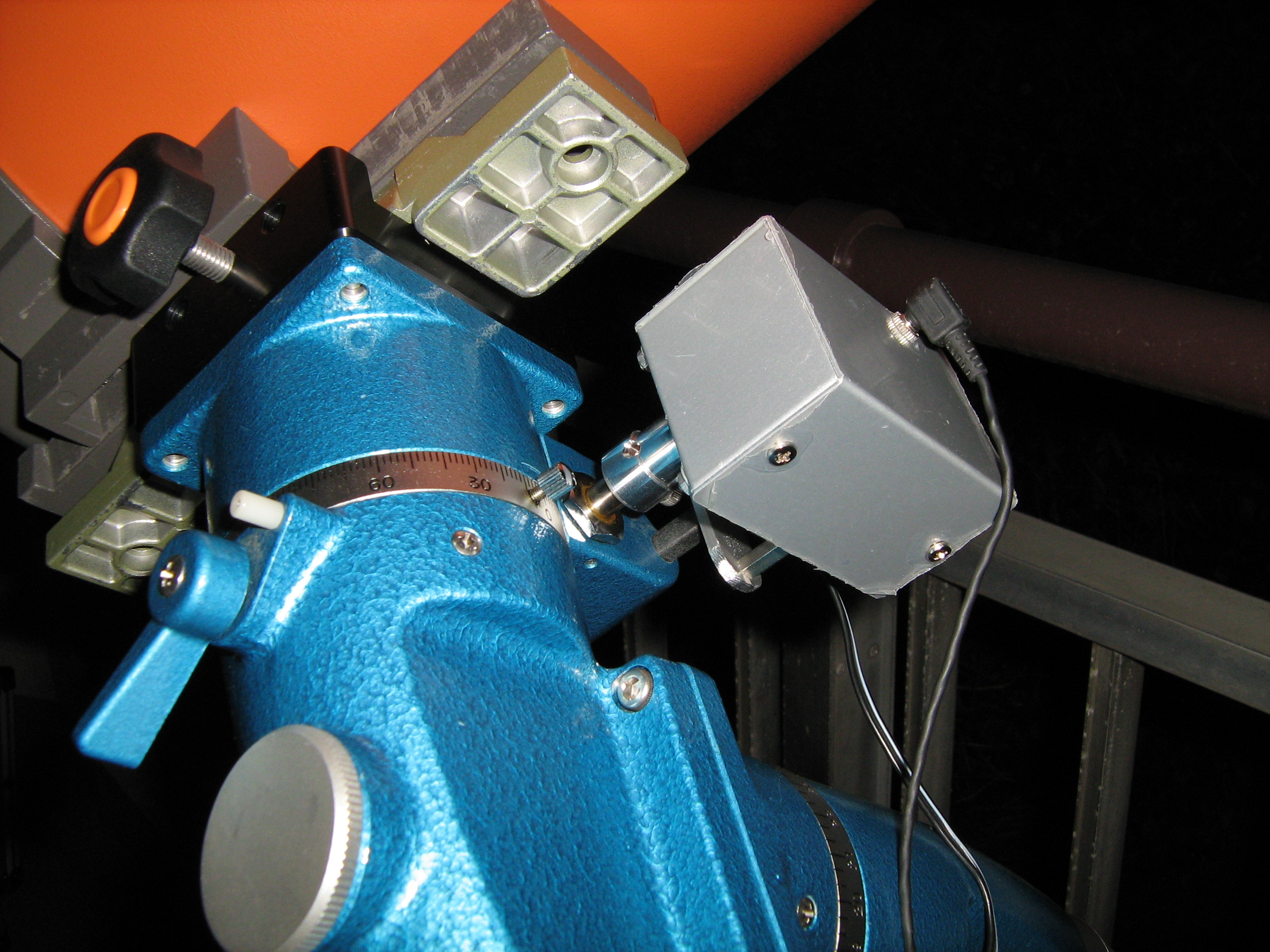
逆算した水晶の周波数をモーター部分に貼り付け。

調整後の周波数と設定値をメモして同じくモータ部分に貼り付け。

コントローラ単体として利用する物についても同様に調整中。

自作モータードライブベランダテスト ― 2011年11月04日 23時22分47秒
EAGLEで回路設計、基板設計したPICマイコン制御のモータードライブ基板を使ったモータードライブ。ベランダで実際に望遠鏡の追尾に使ってみました。対象は木星と月。
鏡筒はC8(20cmF10シュミットカセグレン)。
鏡筒はC8(20cmF10シュミットカセグレン)。
一応これくらいの荷重のセットであれば問題なく追尾できて、赤緯コントロールも問題ないことを確認。
両軸に付けたモータードライブによる物理的な干渉も一部を除いて問題ない。干渉する場合は東側と西側を逆にして対象を観測すれば問題なし。
あえて難を挙げるとキヤノンのE3リモートスイッチによる半押し:FAST制御。なれないと半押しを維持して高速可変させるのは難しい。
月を観測中。
両軸に付けたモータードライブによる物理的な干渉も一部を除いて問題ない。干渉する場合は東側と西側を逆にして対象を観測すれば問題なし。
あえて難を挙げるとキヤノンのE3リモートスイッチによる半押し:FAST制御。なれないと半押しを維持して高速可変させるのは難しい。
月を観測中。

赤経モータの取り付けと追尾は問題なし。リモートスイッチ用のジャックも問題なし。

赤緯側のモータ取り付けも問題なし。今回は対物側に取り付けているが接眼側でも問題なさそう。

赤経モータの純正架台との干渉も問題なし。

天頂付近の木星を観測中。モーター同士の干渉も問題なし。鏡筒を西側に。

鏡筒を東側に変更。

ロングウェイトシャフトを使っているので比較的軽めのウェイトで足りている。

最近のコメント