
ナノ・トラッカー分解 ― 2012年08月02日 20時35分20秒
ナノ・トラッカー(nano tracker)届いたので早速分解してみました。というよりも中身が見たくで買ったのでした。
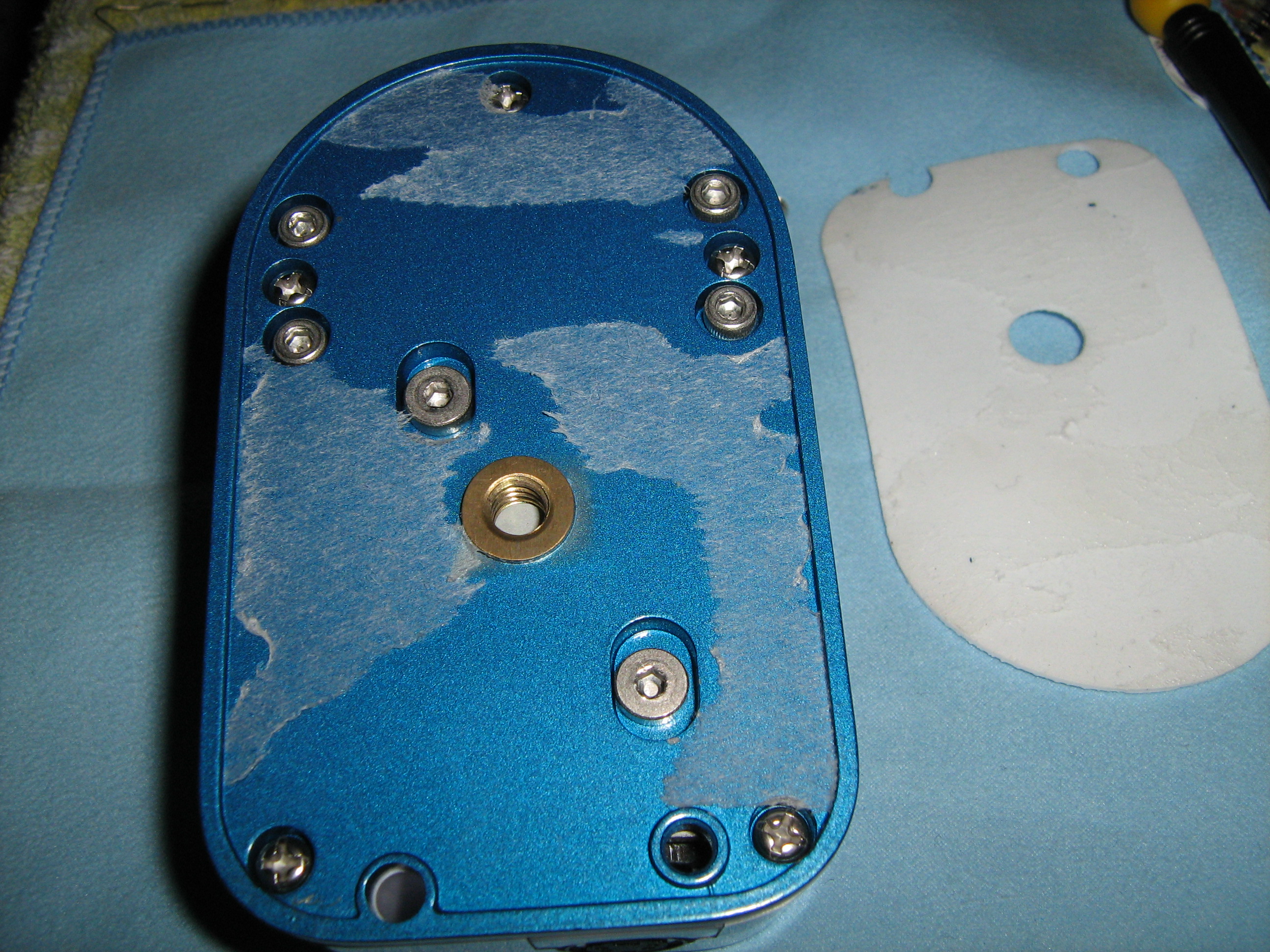
雲台取り付け面には1/4Wの三脚用のネジ穴と極軸合わせ用の穴が開いています。イモビスが取り付けられている穴はコネクタ部分が見えるのですが用途不明。はずしておかないとなくしてしまうことでしょう。

剥がすと以下のようになります。分解のために取り外しが必要なのは+のネジのみで、キャップスクリューはそのままでかまいません。プラスネジは白色の樹脂カバーに固定されています。
六角レンチで2箇所のイモビスを緩めて赤経ステージ?をはずします。実はこの4箇所のプラスネジでケースと中身の筐体が連結しているだけ。


ステッピングモータはバイポーラ型です。ミニDINコネクタで外部のコントローラと接続されます。



コントローラの中身は以下。

マイクロステップ駆動用の専用コントローラはなく、PICマイコンがあるだけ。

MT-1モータと自作コントローラでのMARK-X追尾テスト ― 2012年08月03日 03時42分03秒
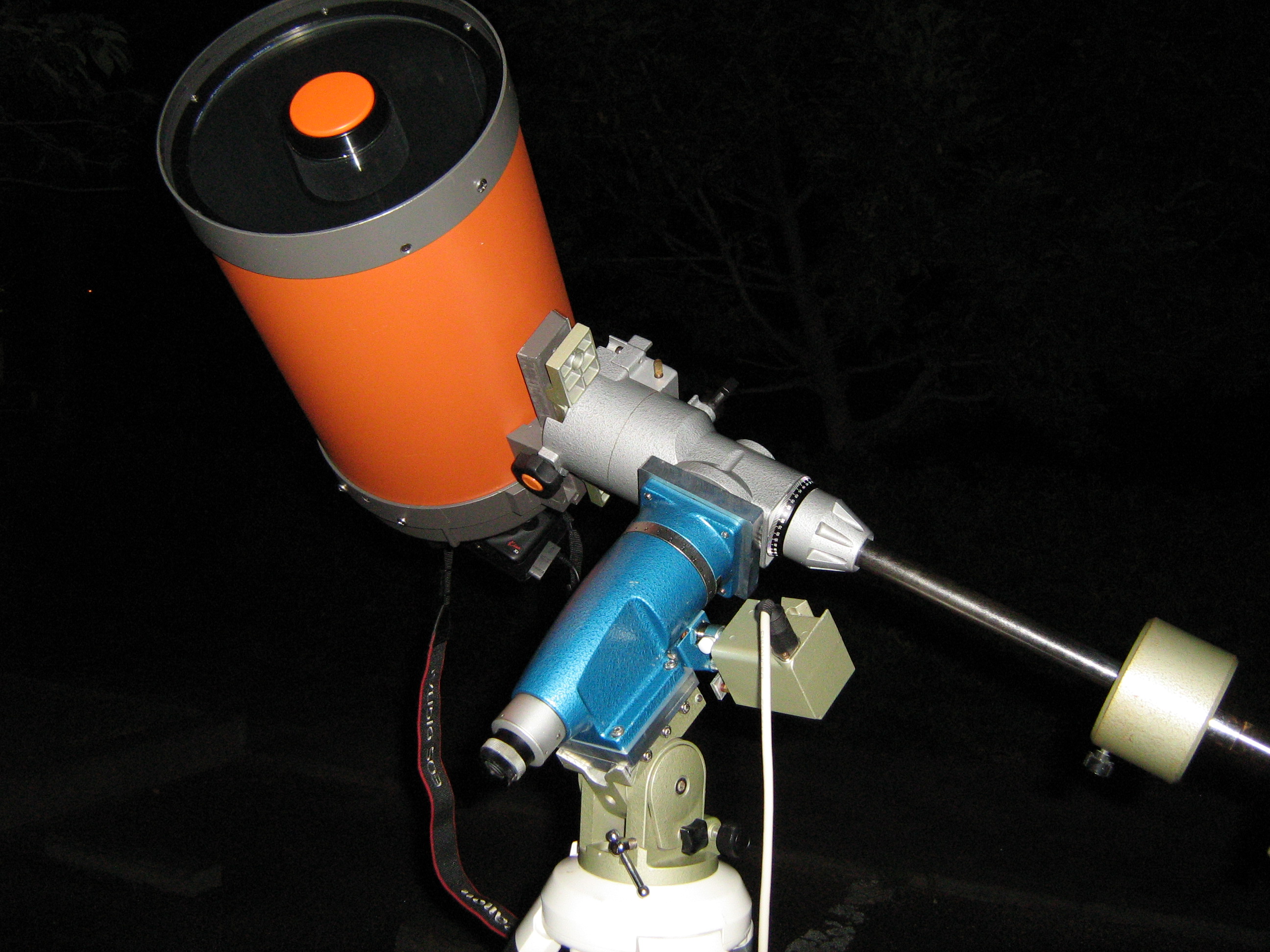
ビクセンのMT-1モータを五藤光学マークX赤道儀に物理的に取り付けて自作のコントローラでの追尾テストです。
この日は北極星も確認できているので極軸は極軸望遠鏡による調整のみ行っています。実際の追尾での極軸の微調整までは行っていません。
月や星の写真撮影は以下すべて同じ条件です。
C8+F6.3レデューサ+EOS Kiss X3直焦点撮影。
35mm版カメラ換算で焦点距離は2016mmということになります。
ISO設定は月が200で星の写真は400になっています。
この日は北極星も確認できているので極軸は極軸望遠鏡による調整のみ行っています。実際の追尾での極軸の微調整までは行っていません。
月や星の写真撮影は以下すべて同じ条件です。
C8+F6.3レデューサ+EOS Kiss X3直焦点撮影。
35mm版カメラ換算で焦点距離は2016mmということになります。
ISO設定は月が200で星の写真は400になっています。
今回のテストの目的は以下です。
1.新機能である月時可変速テスト
※月時モードの初期設定は平均値ですがFASTスイッチを押すと恒星時比0.01%ずつ増速し、STOPスイッチを押すと0.01%ずつ減速する機能
2.恒星時駆動のテスト
●テスト1(月時可変速テスト)
まずは恒星時追尾モードでの月の写真。

10分間隔での撮影です。赤経方向だけでなく赤緯方向の移動も見られます。



次は平均月時追尾モードに設定。
一旦電源を切って、FASTスイッチとSTOPスイッチを押しながら電源投入すると初期値である平均月時:恒星時比96.35%に設定されます。

以下は平均月時追尾モードでの月の移動の写真。
この日の月については平均月時では遅れすぎのようです。



以下は平均月時追尾速度からFASTキーで増速設定操作を行った後の状況です。まだ完全ではありませんが赤経方向のずれの度合いは少なくなってきています。



●テスト2(恒星時追尾テスト)
以下の露出時間での写真はもっと短時間でも流れているものがありますので選別して状態の良いものを掲載します。
1260mm直焦点撮影(35mm版換算で2016mm)ではいろんな要因で流れます。
撮影結果により、基本的なモータードライブのトルクと追尾精度は確保できていると判断します。
木星:60秒露出。明るさ調整。

プレアデス付近:118秒露出。明るさ調整。

以下は月時テストで増速設定した最終的な値の確認の為にPICKit2に接続してデータを読み込んだ状態です。
EEPROMには月時モード時の恒星時を10000(100.00%)とした時の比率値を格納しています。
25EEという16進値がその値です。10進数に変換すると9710という値になります。つまり、恒星時比97.10%という設定になっているということです。これは撮影テストの後に更にFAST操作を行ったので撮影時点のものからは変わっています。
ソフトの上限設定値は9711ですのでほぼ上限の値ということになります。

多目的モータードライブコントローラの簡略操作説明 ― 2012年08月08日 08時52分51秒
■概要
PICマイコンを使ったモータードライブコントローラの簡略版操作説明です。
各社のPM型ユニポーラステッピングモータを使ったモータードライブのコントローラとして使用可能です。
単体コントローラの場合、五藤光学のDIN5ピン仕様、ビクセンのDIN5ピン仕様、ビクセンのDIN8ピン仕様に標準対応できます。その他の仕様でも適宜対応可能です。
■電源
以下はコントローラ内蔵一体型のMARK-X用モータードライブのDCジャック部分です。
PICマイコンを使ったモータードライブコントローラの簡略版操作説明です。
各社のPM型ユニポーラステッピングモータを使ったモータードライブのコントローラとして使用可能です。
単体コントローラの場合、五藤光学のDIN5ピン仕様、ビクセンのDIN5ピン仕様、ビクセンのDIN8ピン仕様に標準対応できます。その他の仕様でも適宜対応可能です。
■電源
以下はコントローラ内蔵一体型のMARK-X用モータードライブのDCジャック部分です。

電源電圧は直流12V供給が基本です。
9Vでも動作しますが、増速時にトルクが足りずに脱調する場合があります。
逆に言えば12V以上の電圧、例えば15V供給すればトルクが上がるということになります。
但し、最大でも15V程度を推奨します。
トルク重視ならば12V~15V供給。乾電池駆動で増速操作はせずに写真撮影だけ行うのであれば9V供給というように使い分けることができます。
冬場でトルクが心配ならば15V供給で常用するというようなことは可能です。
■消費電流と発熱
以下、電源電圧が12Vで恒星時駆動の場合の消費電流の目安です。
LEDとPICマイコンの消費電流は加味しておりません。
MT-1用のコントローラは電流制限用の抵抗を接続していますのでケースの発熱が多めになっていますが触れないほど熱くはなりません。それ以外の単体コントローラは電流制限用の抵抗は接続していないため発熱はほとんどありません。
MT-1用コントローラの相単位の電流制限用抵抗値はType1の場合100Ω、Type2の場合75Ωです。
モータ本体の相抵抗が20Ωですので総合的な抵抗値はType1で120Ω、Type2で95Ωです。
これにより相当たりの消費電流はType1で100mA、Type2で126mAとなります。1-2相励磁でのトータルの消費電流はこの値を1.5倍してください。
特に断りのない限りType1でご提供しております。
※(2014年4月28日追記)
MT-1用のコントローラは電流制限用抵抗器を取り付けて提供していましたが、今後はUSB経由での5V電源供給を標準とします。このコントローラでの駆動電圧範囲は5V~9Vとします。5V電源時の相当たりの消費電流は250mAです。このコントローラではモーターの発熱は高くなりますが、コントローラの発熱はほとんどありません。9Vでの消費電流は450mAとなります。12Vでも動作しますが消費電流は600mAとなり、トランジスタアレイの定格最大電流である500mAを超えますので壊れる可能性があります。
ビクセンMD-5用コントローラの消費電流は1相当たり120mAで1-2相励磁トータルで180mA程度です。MD-5で使用されているモータの相当たりの抵抗値が100Ωであることから導き出されます。
五藤光学MARK-X赤道儀用のコントローラの場合は純正モータの仕様により相当たり120mA、1-2相励磁トータルで180mA程度の場合と相当たり85.7mA、1-2相励磁トータルで130mA程度の場合があります。
コメットトラッカーセット品のモータの場合には消費電流が多めになる相抵抗100Ωの仕様のモータが使われています。P型モータードライブとのセット品のモータの相抵抗は140Ωです。
五藤光学MARK-X用の一体型モータードライブの場合は150mA程度の消費電流です。
本コントローラの回路設計上は電源電圧に比例して消費電流が多くなり結果としてトルクも高くなります。
■スイッチ
コントローラには以下のスイッチがあります。
・DIPスイッチ
・FASTスイッチ
・STOPスイッチ
FASTスイッチとSTOPスイッチの機能は以下のようにリモートスイッチ用ジャックにも出ています。
MT-1用のコントローラは電流制限用抵抗器を取り付けて提供していましたが、今後はUSB経由での5V電源供給を標準とします。このコントローラでの駆動電圧範囲は5V~9Vとします。5V電源時の相当たりの消費電流は250mAです。このコントローラではモーターの発熱は高くなりますが、コントローラの発熱はほとんどありません。9Vでの消費電流は450mAとなります。12Vでも動作しますが消費電流は600mAとなり、トランジスタアレイの定格最大電流である500mAを超えますので壊れる可能性があります。
ビクセンMD-5用コントローラの消費電流は1相当たり120mAで1-2相励磁トータルで180mA程度です。MD-5で使用されているモータの相当たりの抵抗値が100Ωであることから導き出されます。
五藤光学MARK-X赤道儀用のコントローラの場合は純正モータの仕様により相当たり120mA、1-2相励磁トータルで180mA程度の場合と相当たり85.7mA、1-2相励磁トータルで130mA程度の場合があります。
コメットトラッカーセット品のモータの場合には消費電流が多めになる相抵抗100Ωの仕様のモータが使われています。P型モータードライブとのセット品のモータの相抵抗は140Ωです。
五藤光学MARK-X用の一体型モータードライブの場合は150mA程度の消費電流です。
本コントローラの回路設計上は電源電圧に比例して消費電流が多くなり結果としてトルクも高くなります。
■スイッチ
コントローラには以下のスイッチがあります。
・DIPスイッチ
・FASTスイッチ
・STOPスイッチ
FASTスイッチとSTOPスイッチの機能は以下のようにリモートスイッチ用ジャックにも出ています。


以下のようにキヤノンのリモートスイッチをつなぐことができます。半押しでFASTで、全押しでSTOP操作になります。工作すればオートガイダー対応も可能です。

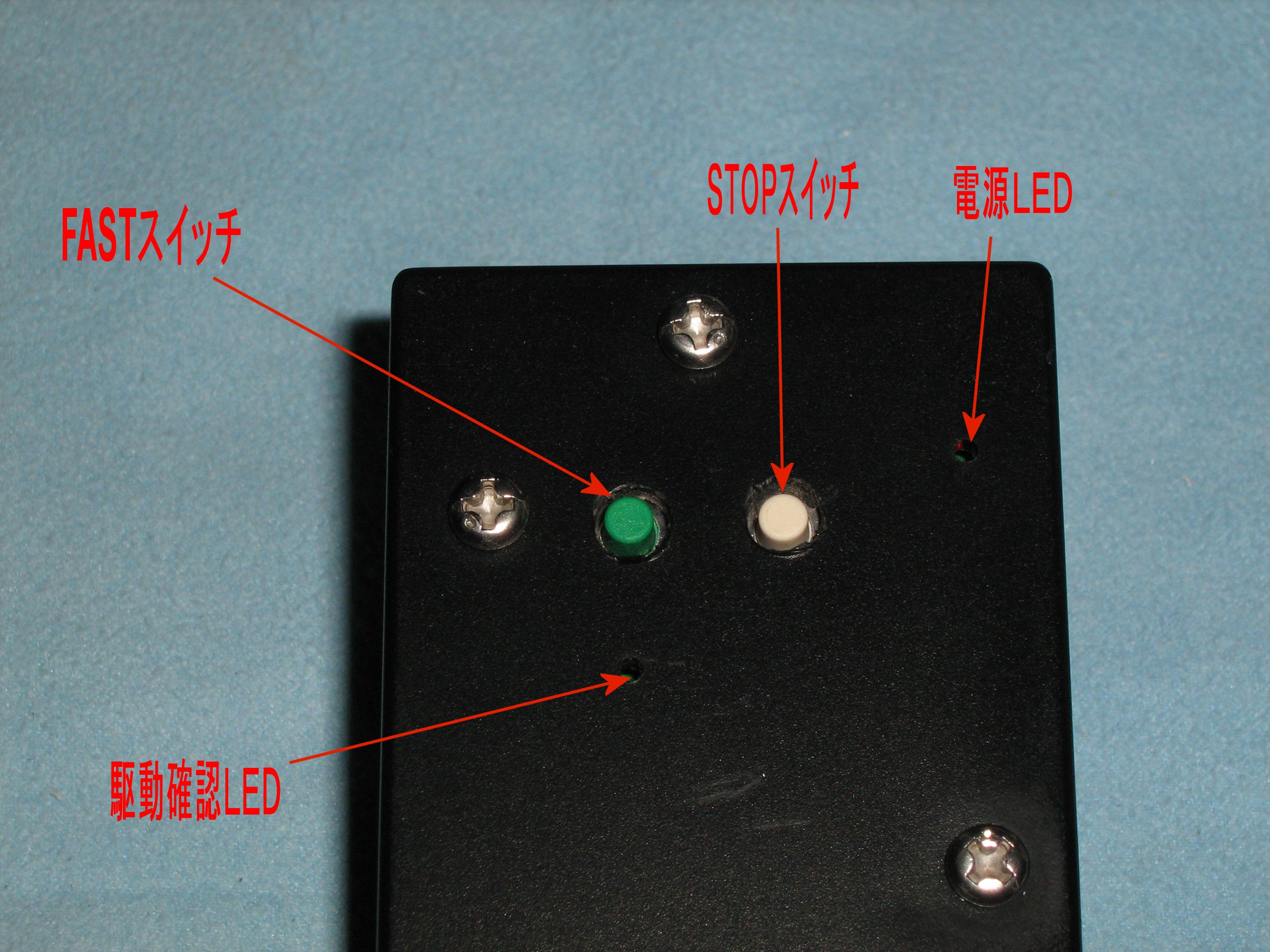
以下は本体のFASTスイッチとSTOPスイッチを含む各部の名称です。スイッチの色はケースの色と製造時の都合により変わります。
独立したコントローラの場合、DIPスイッチはケース内部の基板上にありますのでケースのふたを開けて設定変更する必要があります。
基板上にあるPICマイコン用のプログラム書き換え用コネクタにPICKit2などを接続することによりプログラム書き換えやEEPROMの設定値の変更が可能です。


FASTスイッチを押すと追尾方向に正転で増速します。最初は恒星時比2倍速で正転し、時間経過とともに増速します。最大速度は五藤光学純正モータで最大4倍速、ビクセン製MT-1で最大16倍速、その他モータでは最大8倍速です。
STOP スイッチは最初は停止操作ですが、時間経過とともに恒星時比1倍速逆転、2倍速逆転というように増速逆転します。五藤光学製 純正モータで最大2倍速逆転、ビクセン製MT-1モータで最大8倍速逆転。その他モータでは最大4倍速で逆転します。
STOPスイッチの最大速はFASTスイッチより1段階落としてあります。
なお、FASTスイッチとSTOPスイッチの両方が押されている場合はSTOPスイッチが押されているものとして動作します。
モードスイッチが3(月時モード),6(コメットトラッカーモード),7(赤緯コメットトラッカーモード)の時にFASTスイッチとSTOPスイッチを押したまま電源投入することにより各モードの恒星時比設定を初期設定に戻すことができます。
■動作モード
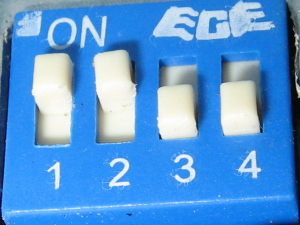
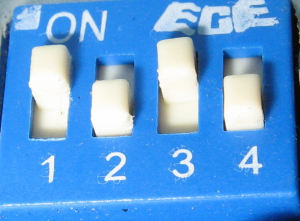
DIPスイッチの意味は以下です
製造時の都合でDIPスイッチの部品が異なる場合があります。

モード0
恒星時追尾設定

モード1
キングスレート追尾設定(恒星時比99.97%駆動)
キングスレート追尾設定(恒星時比99.97%駆動)

モード2
平均太陽時追尾設定(恒星時比99.73%駆動)
平均太陽時追尾設定(恒星時比99.73%駆動)

モード3
月時モード設定
初期ソフトウェア(2012年6月以前リリース)では平均月時(恒星時比96.35%)のみですが最新ソフトウェア(2012年7月リリース以降)では可変速制御(恒星時比95.4%~97.11%可変:初期値は96.35%)を行います。
可変速制御が可能なソフトウェアでは初期状態は平均月時設定である96.35%で駆動しますが、FASTスイッチを押すと恒星時比0.01%増速し、STOPスイッチを押すと恒星時比0.01%減速します。変更された恒星時比の値はEEPROMに記憶されて電源OFFしても消えません。
月時モード設定
初期ソフトウェア(2012年6月以前リリース)では平均月時(恒星時比96.35%)のみですが最新ソフトウェア(2012年7月リリース以降)では可変速制御(恒星時比95.4%~97.11%可変:初期値は96.35%)を行います。
可変速制御が可能なソフトウェアでは初期状態は平均月時設定である96.35%で駆動しますが、FASTスイッチを押すと恒星時比0.01%増速し、STOPスイッチを押すと恒星時比0.01%減速します。変更された恒星時比の値はEEPROMに記憶されて電源OFFしても消えません。
モード4
星景モード設定(恒星時比60%駆動)

モード5
赤緯モード設定
FASTスイッチとSTOPスイッチを押さない限りは駆動しません。
FASTスイッチを押すと正転で恒星時比2倍で駆動してSTOPスイッチを押すと逆転で恒星時比2倍で駆動します。
五藤光学純正モータ用のコントローラの場合は最大で4倍速まで増速します。ビクセン製MT-1モータ用のコントローラの場合は最大で16倍速まで増速します。それ以外のモータの場合は最大8倍速まで増速します。
モード6
コメットトラッカーモード設定
初期状態では恒星時駆動を行いますがFASTスイッチを押すと恒星時比0.01%増速し、STOPスイッチを押すと恒星時比0.01%減速します。変更された恒星時比の値はEEPROMに記憶されて電源OFFしても消えません。
なお、この機能は初期ソフトウェアでは対応しておりません。

モード7
赤緯コメットトラッカーモード設定
初期状態では恒星時比0.00%で設定されており駆動しませんが、FASTスイッチを押すと恒星時比0.01%増速し、STOPスイッチを押すと恒星時比0.01%減速します。変更された恒星時比の値はEEPROMに記憶されて電源OFFしても消えません。
なお、この機能は初期ソフトウェアでは対応しておりません。

ビクセンやビクセンユーザが気づかないこと ― 2012年08月09日 18時28分56秒
ビクセンGP赤道儀を勉強のために入手してモータードライブの開発の実験もさせてもらいました。
いろいろと発見がありますが、その発見した情報をビクセンの説明書やビクセンユーザの情報発信の中身で見たことがありません。何で気づかないんだ、というようなことです。
いろいろと発見がありますが、その発見した情報をビクセンの説明書やビクセンユーザの情報発信の中身で見たことがありません。何で気づかないんだ、というようなことです。
以下、気づいたこと。
1.ビクセンのギアのバックラッシュ調整はあまり意味がない。
1.ビクセンのギアのバックラッシュ調整はあまり意味がない。

バックラッシュを少なくするためにウォームギアや平ギアの当たりの調整を勧めるような記事がいろんなところにあります。固めの調整をしてモータのトルクを上げたほうが良いという情報も。※(2013年7月15日追記。日本語難しいですね。上記、固めの調整をして・・・という件の文章表現変更します)「固めの調整をした上で、トルクの高いモーターに交換することを勧めたり、平ギアの交換をして減速比を上げてトルクを上げることを勧めたりするようなめんどくさいことを勧める内容のブログの記事すらあります」
でもね、日本パルスモータ製のギアードステッピングモータの出力軸に既に遊びがかなりあるわけです。平ギアつけて手で回してみるとすぐわかります。
この点に着目している情報を見たことがないんですね。
ウォームギアや平ギアの調整はあまりシビアにやっても無駄なだけです。逆にウォーム軸とウォームホイルの当たりは軽めにしてウォーム軸の回転を軽めにしたほうが結果は良いのではないかと個人的には思うところ。赤緯軸なんかは特に。軸側のグリスがからからでぱりぱりになったSP赤道儀を分解した経験からはこんな結論になります。
結論:自分でオーバーホールしてグリスをモリブデン系に換えられない人は全て、調整するなら遊びは多めにして軽めに調整した方が良いと思います。モータの駆動的には絶対に安定します。でも多分こんな情報発信はここだけ。
2.MT-1モータのトルクは必要十分
DCモータの場合にトルクアップのために平ギアのギア比を変えるような記事があるので勘違いする人もいるかもしれないけど、MT-1モータで使っている日本パルスモータ製のステッピングモータのトルクはMT-1モータ用のビクセンのコントローラで使う限りは必要以上に高トルクです。
相当たり300mA程度流れますので16倍速でも脱調しない程度のトルクは確保できています。
もし脱調するならバックラッシュ以前に極軸などの回転が渋すぎる可能性があります。微動が手動でできることが最低条件です。多分バックラッシュ調整と称して回転が渋くなるまでの調整をしてステッピングモータが脱調するような状態で無理に使っているとモータに内蔵されたギアが壊れる可能性もあります。
なお、自作のコントローラのMT-1対応では相当たり12V電源で100mAしか流しません。これでも十分にトルクは確保できていました。但し、グリスの良くないビクセンで冬場が持つかどうかは今後の実験によります。きつめな調整の赤緯軸で今後は試すことになるでしょう。※ビクセンのGP赤道儀極軸体は今後は使わないので。
3.目盛環の使い方をビクセンというメーカは理解していない(と思われる)
目盛環は赤経軸の場合、緩めて回転できて、締め付けて極軸と連動できるようにならないといけないのですが、そもそもGP赤道儀の構造はそうなっていません。私の記憶が確かならSP赤道儀は問題なかったはずです。
まともな製品の赤経目盛環ならば目盛環側にローレットネジがあり、ネジを締め付けると極軸側との摩擦で極軸に同期して回るようになります。そしてネジを緩めたら目盛を任意の座標位置に合わせられるようになっています。
ところが、GP赤道儀の赤経目盛環の固定用のネジは目盛環側ではなく極軸の外側のフレームについています。非稼動部に目盛環を固定してどうしたいのでしょうか。
しかもそれだけではなく、目盛環固定ネジを締め付けると目盛環が傾いてフレームに固定されるので極軸に余計なテンションをかけてクランプと同じように回転が渋くなります。
上記の渋くなった状態で正規の赤経クランプを緩めても360度以上極軸は回転できなくなります。
こんな状態で、もし使っている人がいるとするとモータードライブで追尾できるはずがありません。いろんなGP赤道儀のトラブルは結構こんなところにあるような気がします。
以下はGP赤道儀を上から見たところです。わざと目盛環をはずす方向にずらしています。上のローレットネジが「赤経目盛環固定ネジ」。ビクセンの説明書ではネジで固定しろと書いてありますけど使うときには緩めろとは書いてありません。

極軸望遠鏡をはずして目盛環も極軸からはずしたところ。単純にグリスの粘度があるだけで何の仕組みもない構造です。フレームにねじ切ってどうするというのでしょう。

極軸望遠鏡の調整時に赤経座標0時0分部分に固定するのは極軸望遠鏡の時角を合わせるときだけの話。通常運用時にはそんなところで固定してはいけません。してはいけないことをしてはいけないと書いていない取扱説明書しかないということで、ビクセンは頭がおかしいと思います。この件に関してだけは60mmで500倍の望遠鏡売ってるような粗悪メーカと大差ないです。
この記事の冒頭の写真での状態は実は赤経目盛環固定ネジ締め付けちゃってます。自作コントローラのテストの時です。危ない危ない。ネジが緩んでいると締め付けたくなる人は結構いるでしょう。ビクセンの目盛環部分のネジは締め付けたら追尾に失敗したり最悪の場合はモーターを壊す可能性が高くなりますので注意しましょう。
この記事の冒頭の写真での状態は実は赤経目盛環固定ネジ締め付けちゃってます。自作コントローラのテストの時です。危ない危ない。ネジが緩んでいると締め付けたくなる人は結構いるでしょう。ビクセンの目盛環部分のネジは締め付けたら追尾に失敗したり最悪の場合はモーターを壊す可能性が高くなりますので注意しましょう。
ナノ・トラッカーファーストライト ― 2012年08月13日 01時20分46秒
nano tracker試してみました。
電池はエネループです。
カメラはEOS Kiss Digital N,ISO800設定。レンズはAi-s Nikkor 35mm F2→F2.8,179秒露出。適当に空に向けたので左端にM31がちょっとだけ入っています。極軸あわせができていないので流れています。
電池はエネループです。
カメラはEOS Kiss Digital N,ISO800設定。レンズはAi-s Nikkor 35mm F2→F2.8,179秒露出。適当に空に向けたので左端にM31がちょっとだけ入っています。極軸あわせができていないので流れています。

極軸あわせるための「穴」は全く役立たず。なんとなく北極星の方に向けました。スマートホンで北と仰角で合わせたほうがましでしょう。

最近のコメント