
Google Developer Day 2011の記録 ― 2011年11月01日 23時59分29秒
特に文章はなし。
写真をいくつか貼っておく。
写真をいくつか貼っておく。
メインホール。基調講演開始前。




5階でのセッション。2011/3/11時のGoogleのビルからの光景らしい。

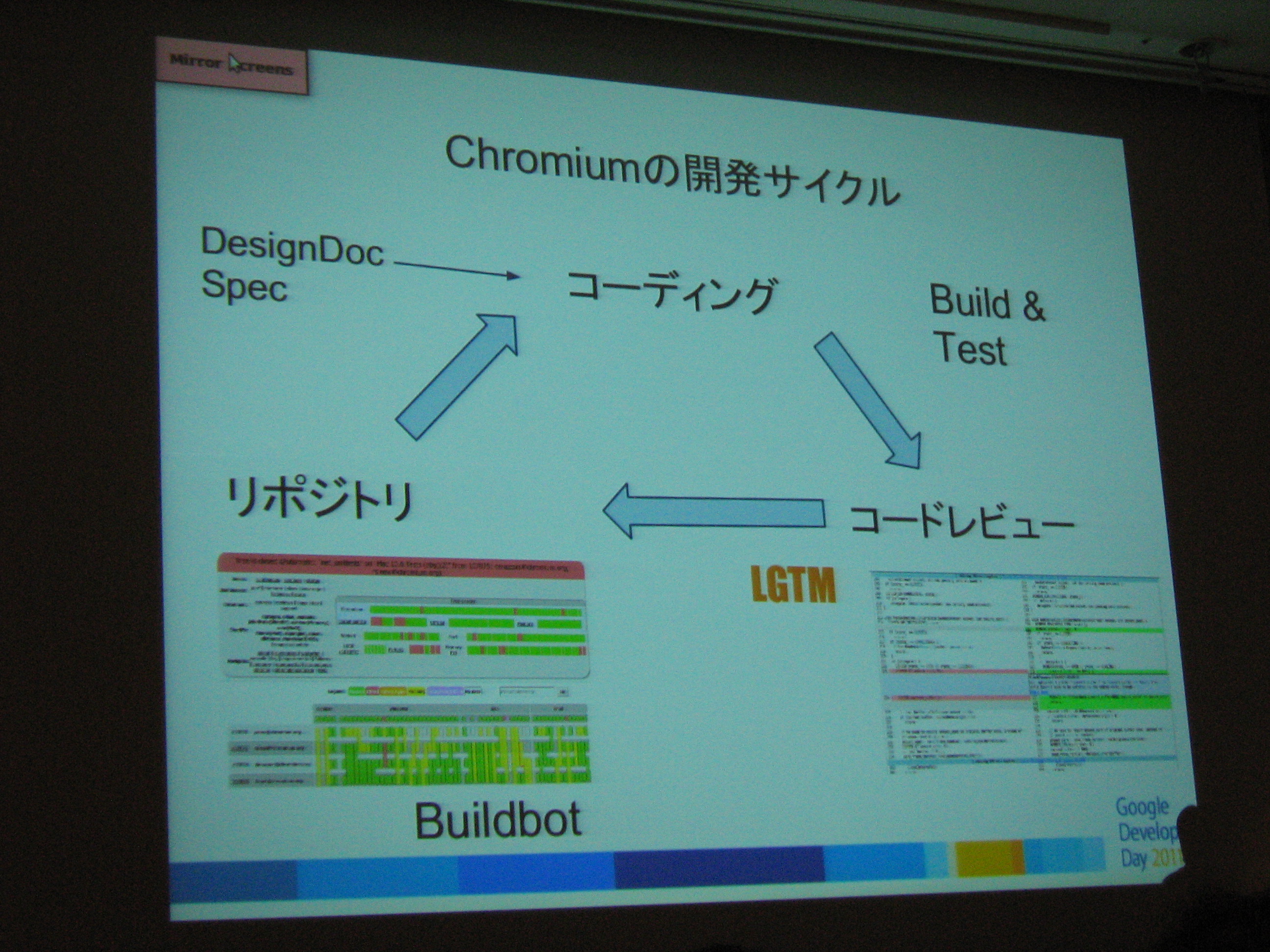
Chromeの開発ではコンパイル時間がハンパではないということでクラウドコンパイラ。リポジトリ登録後のテストも自動化しているらしい。

distccでも余り改善しない。
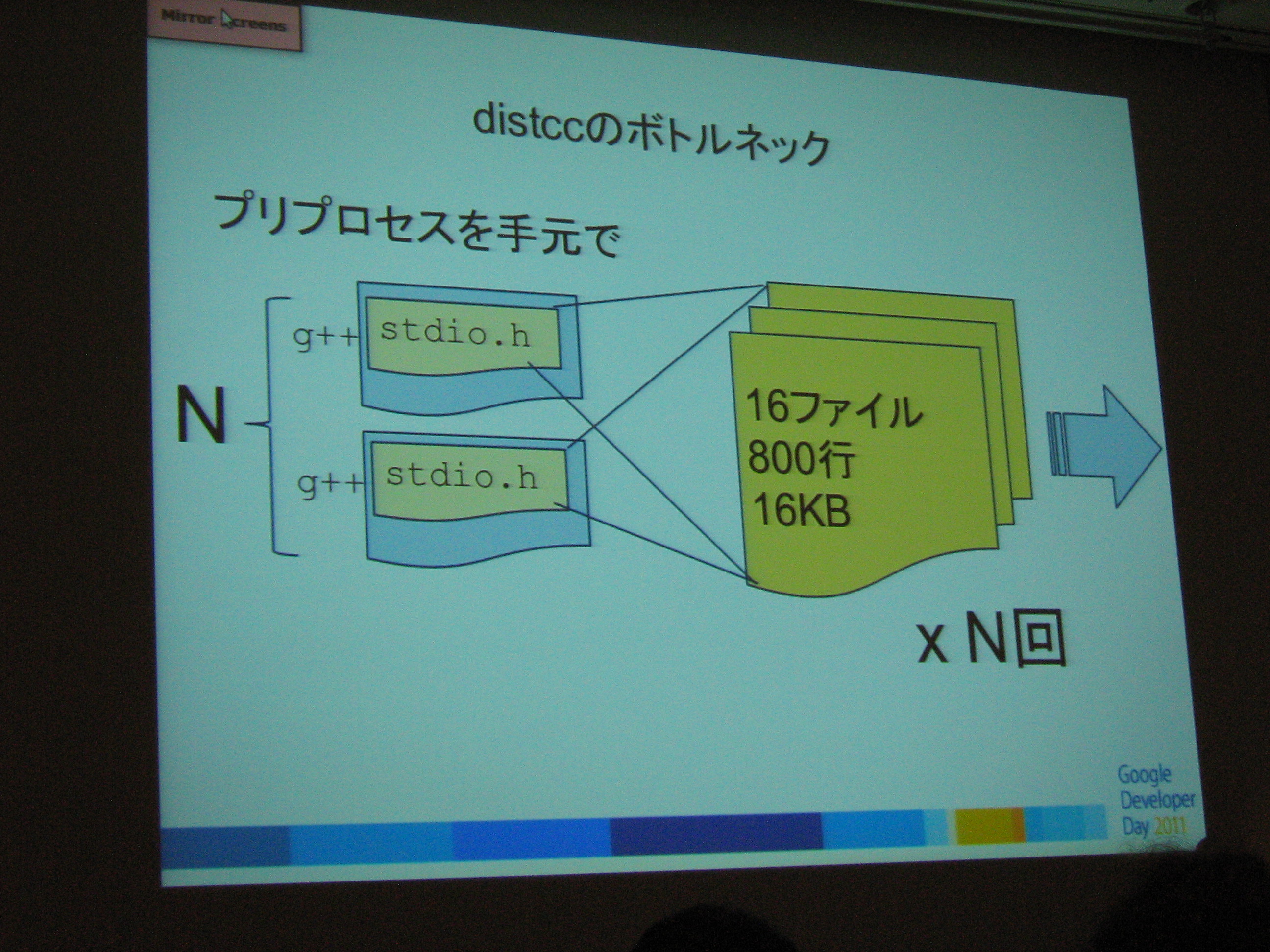
Googleの解決方法の初期段階。discc-pumpを開発。

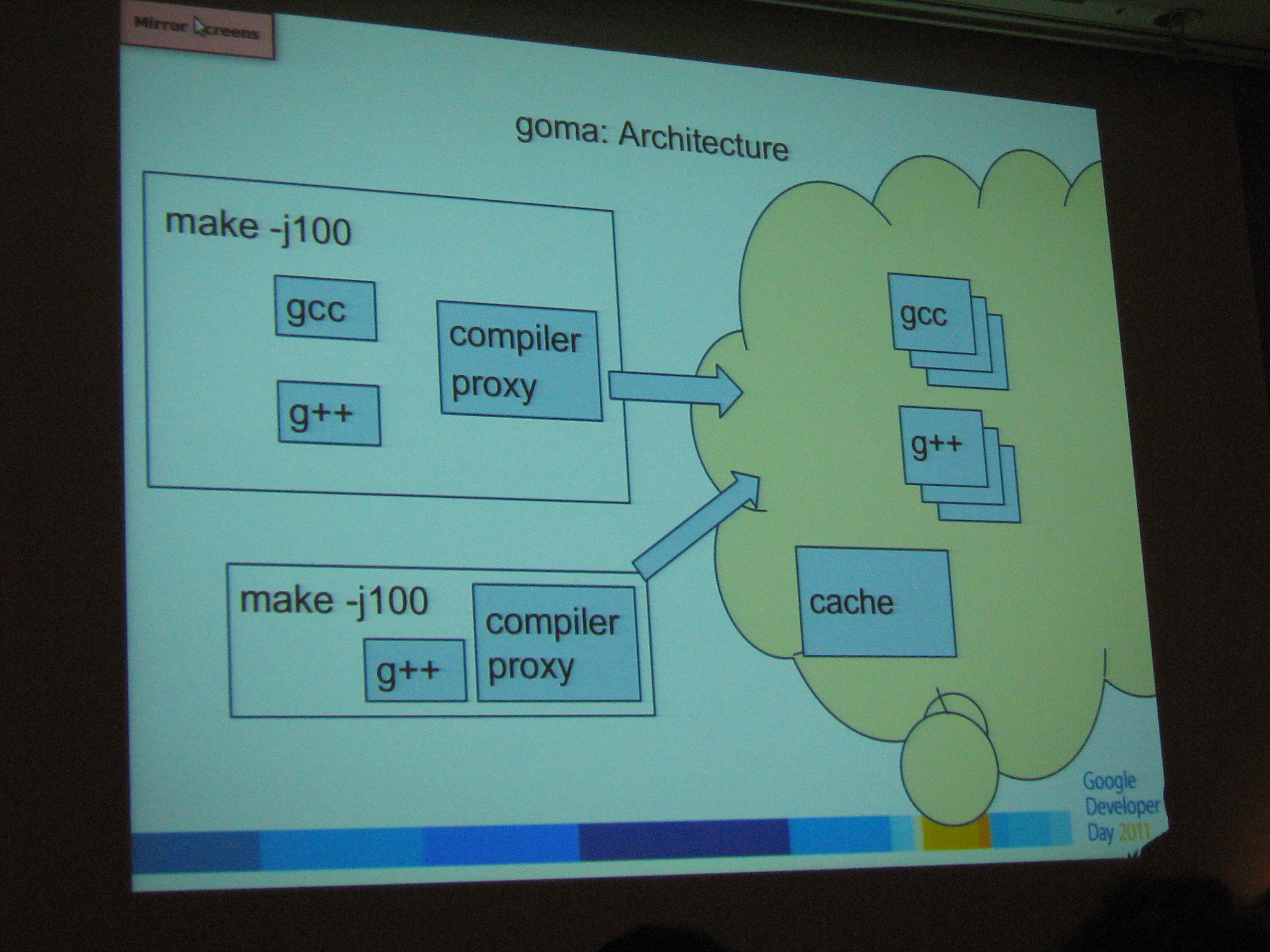
Googleの解決方法。gomaを開発。gomaという言葉は何らかの略ではない。単なる語呂が良いというだけらしい。
起業の話。ぶっちゃけ。余り参考にならん。

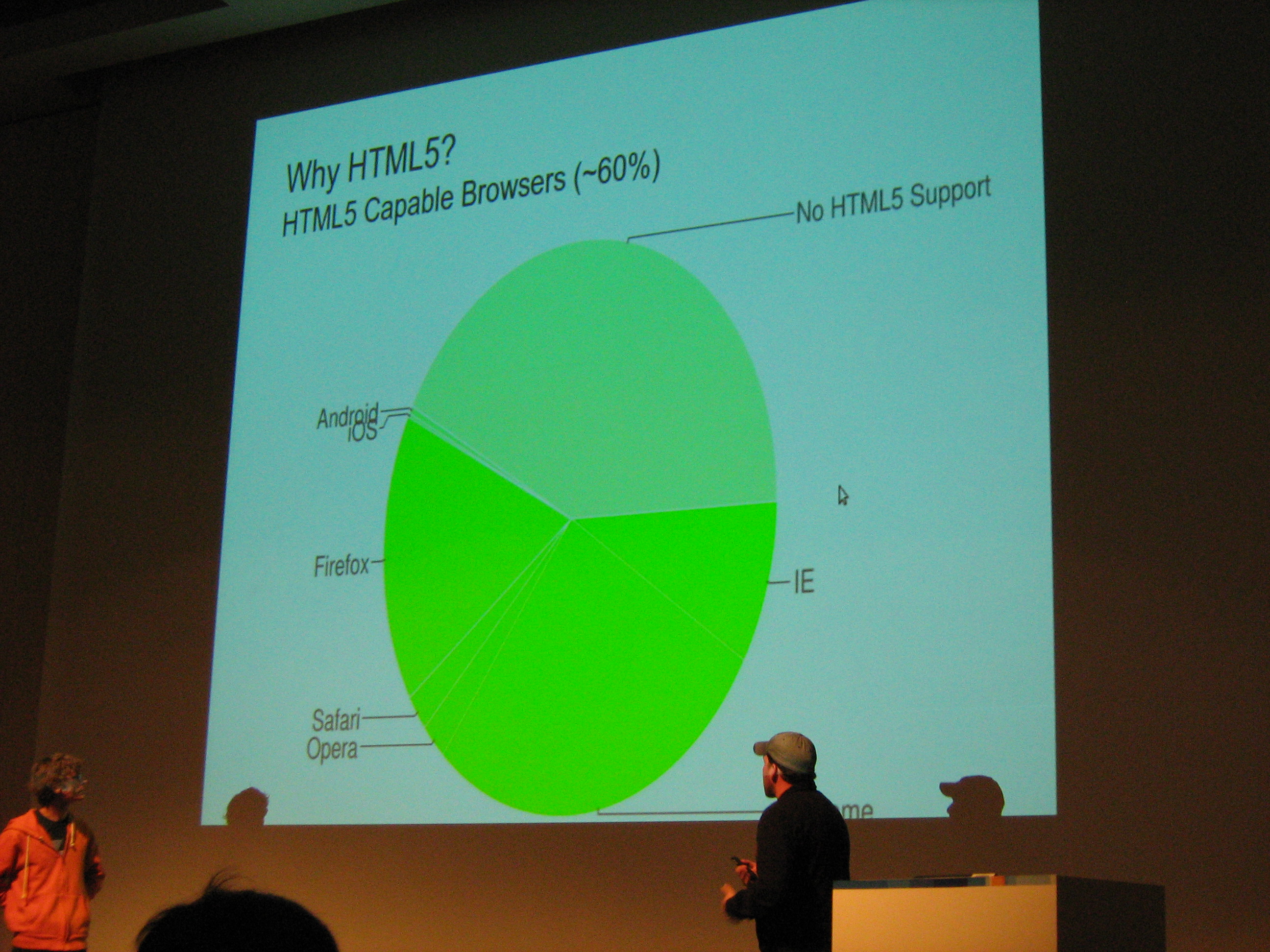
HTML5とFlashの対決。結論としてはHTML5利用を頑張ってみんなでやれ。



モーター励磁電流調整 ― 2011年11月03日 00時38分48秒
モータードライブコントローラ基板の回路図にはあえて加えていませんが、モータとの配線の途中に抵抗を入れます。
使用するモータの定格は12Vなので特に12Vを印加する場合の抵抗挿入は不要ですが、以下の理由により抵抗を配線上で追加します。
・室内常温での実験で加熱しすぎ(多分70℃を超えている)
・消費電流を抑える
・励磁できてトルクが確保できれば電流は抑えても構わないことを天文ガイドの自作例で見てきているため
・五藤光学のモータードライブのモータはコイル抵抗値をオーダーできて、実際に140Ωとか100Ωで使われている
・つまり、日本電産サーボのKP4P15G12V1/600の抵抗66Ωは低すぎ
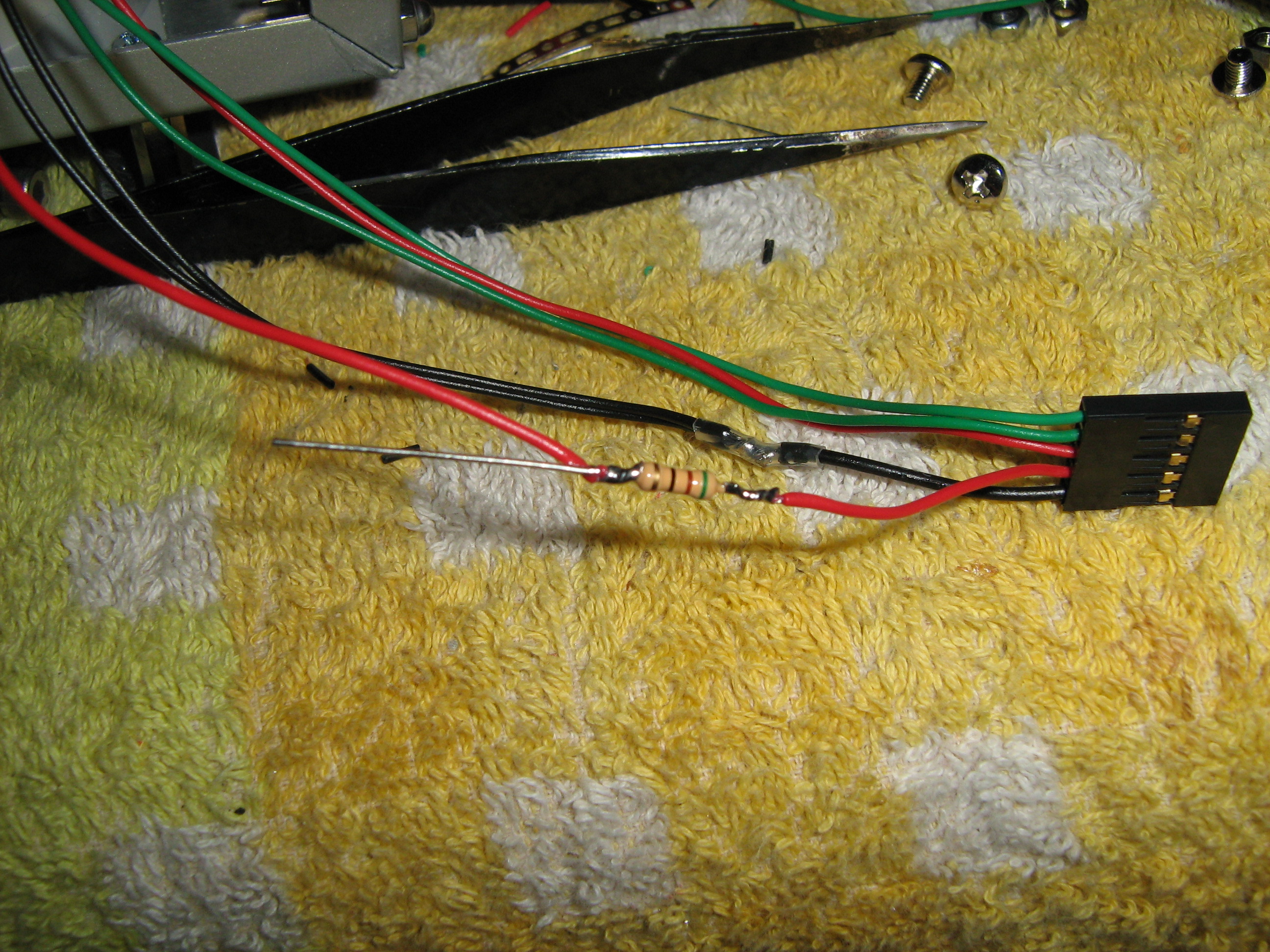
51Ωの抵抗を4相分の配線に直列に入れる。COMMONは印加電圧なので抵抗不要。電流値は半分程度に落ちる。
・室内常温での実験で加熱しすぎ(多分70℃を超えている)
・消費電流を抑える
・励磁できてトルクが確保できれば電流は抑えても構わないことを天文ガイドの自作例で見てきているため
・五藤光学のモータードライブのモータはコイル抵抗値をオーダーできて、実際に140Ωとか100Ωで使われている
・つまり、日本電産サーボのKP4P15G12V1/600の抵抗66Ωは低すぎ
51Ωの抵抗を4相分の配線に直列に入れる。COMMONは印加電圧なので抵抗不要。電流値は半分程度に落ちる。


一度圧着して接続してから抵抗を挿入するために途中切断。

ハンダ付け中
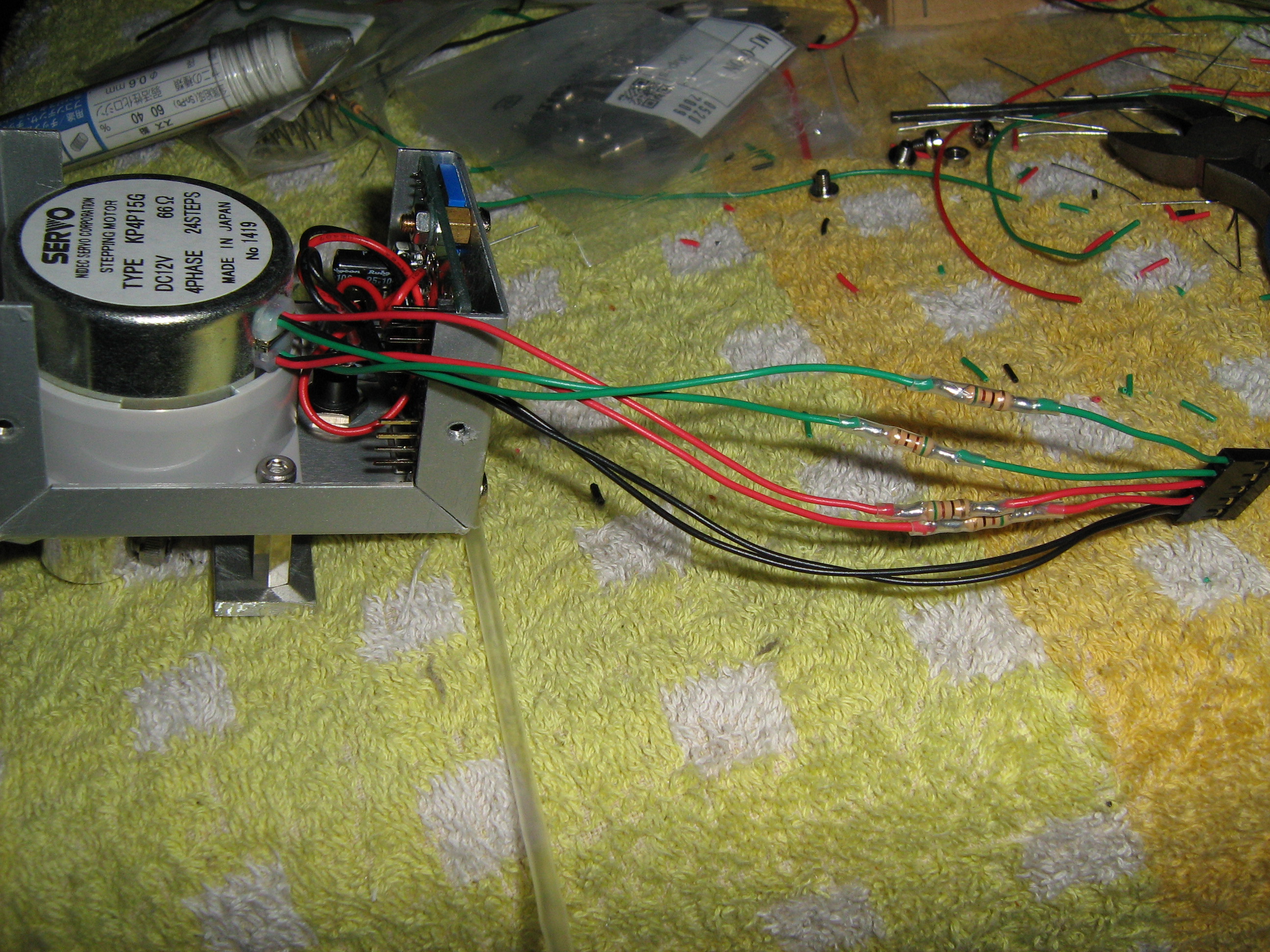
モーターとコネクタの対応付けが分かるようなメモ写真。
コネクタを基板に接続した場合の対応付けが分かるようなメモ写真。

モータードライブ出荷調整 ― 2011年11月04日 04時27分19秒
MARK-X用のモータードライブコントローラとモータードライブですが、基板や部品を自分が使う以上に入手したため、オークション経由で販売することにしました。
1台ずつ調整した上で、実測値を内部にシールを貼ることにしました。最初はケースのフタなどに貼っていたのですが複数台並行作業中に分からなくなってしまうので、モータまたはケースの基板側に貼ることにしました。
以下は8MHzの水晶でのモーター一体型での1相周波数測定状態。
5.26476Hzです。期待値より少し周波数が高い。
以下は8MHzの水晶でのモーター一体型での1相周波数測定状態。
5.26476Hzです。期待値より少し周波数が高い。

逆算した水晶の周波数をモーター部分に貼り付け。

調整後の周波数と設定値をメモして同じくモータ部分に貼り付け。

コントローラ単体として利用する物についても同様に調整中。

自作モータードライブベランダテスト ― 2011年11月04日 23時22分47秒
EAGLEで回路設計、基板設計したPICマイコン制御のモータードライブ基板を使ったモータードライブ。ベランダで実際に望遠鏡の追尾に使ってみました。対象は木星と月。
鏡筒はC8(20cmF10シュミットカセグレン)。
鏡筒はC8(20cmF10シュミットカセグレン)。
一応これくらいの荷重のセットであれば問題なく追尾できて、赤緯コントロールも問題ないことを確認。
両軸に付けたモータードライブによる物理的な干渉も一部を除いて問題ない。干渉する場合は東側と西側を逆にして対象を観測すれば問題なし。
あえて難を挙げるとキヤノンのE3リモートスイッチによる半押し:FAST制御。なれないと半押しを維持して高速可変させるのは難しい。
月を観測中。
両軸に付けたモータードライブによる物理的な干渉も一部を除いて問題ない。干渉する場合は東側と西側を逆にして対象を観測すれば問題なし。
あえて難を挙げるとキヤノンのE3リモートスイッチによる半押し:FAST制御。なれないと半押しを維持して高速可変させるのは難しい。
月を観測中。

赤経モータの取り付けと追尾は問題なし。リモートスイッチ用のジャックも問題なし。

赤緯側のモータ取り付けも問題なし。今回は対物側に取り付けているが接眼側でも問題なさそう。

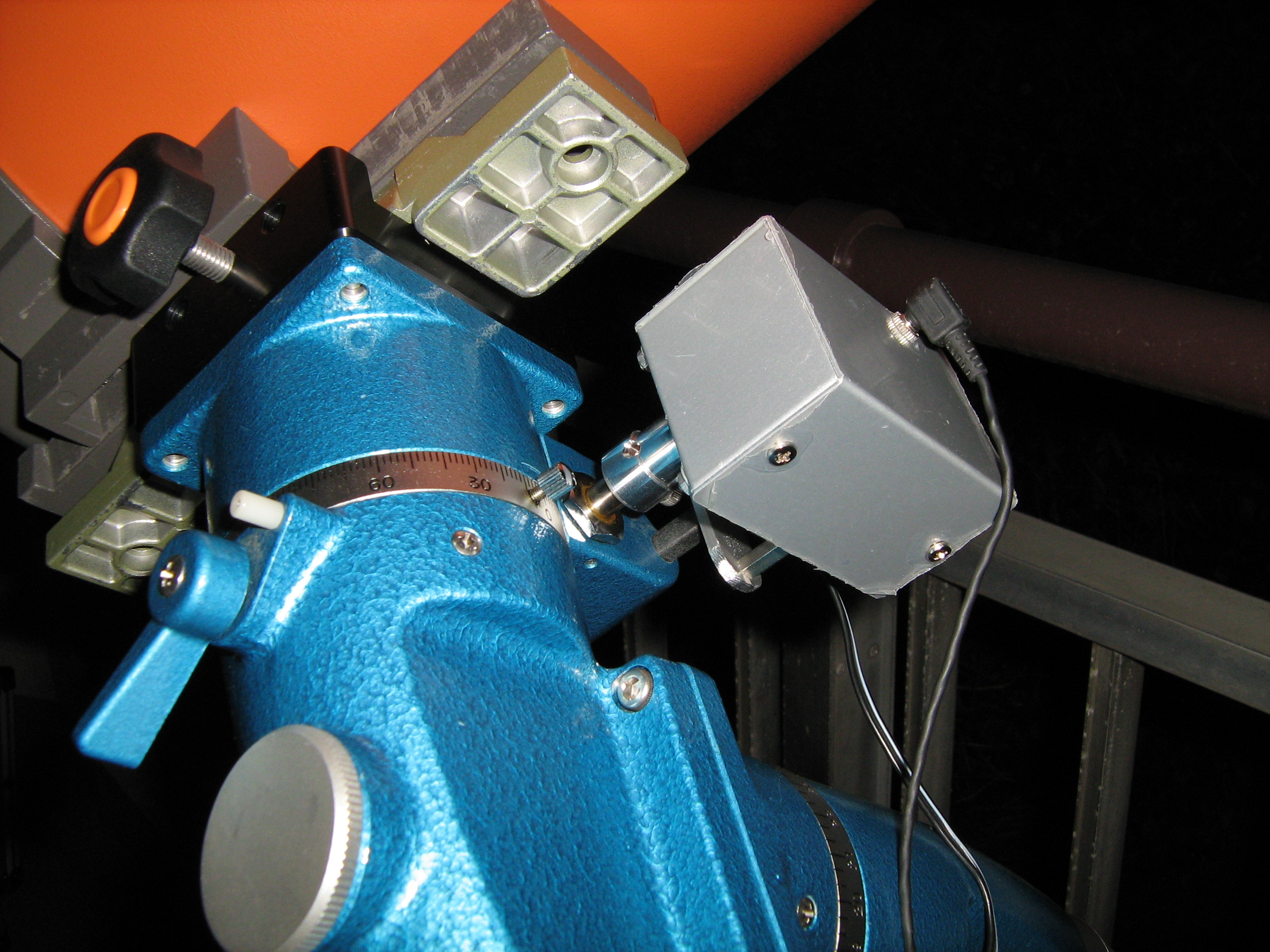
赤経モータの純正架台との干渉も問題なし。

天頂付近の木星を観測中。モーター同士の干渉も問題なし。鏡筒を西側に。

鏡筒を東側に変更。

ロングウェイトシャフトを使っているので比較的軽めのウェイトで足りている。

ポケットガイガーキット到着 ― 2011年11月13日 23時30分30秒
なかなか予約注文できないポケットガイガーキットをやっと入手できました。
本体価格3500円、組み立て手数料200円、代引き手数料+送料550円という
ことで、総額4250円です。
これとは別にFRISKケースを使うため、FRISKと9Vの電池も必要です。
本体価格3500円、組み立て手数料200円、代引き手数料+送料550円という
ことで、総額4250円です。
これとは別にFRISKケースを使うため、FRISKと9Vの電池も必要です。
電池は買ってませんがFRISKはドラッグストアで179円でした。

今回の出荷分から基板とかケーブルの構成が変っているようです。
以前の「ロット」ではフォーンケーブルは基板直だしだったようですが、
コネクタが基板に取り付けられていて普通のステレオプラグのケーブルを
使うようです。
最近のコメント