
MARK-X赤道儀のMD-5によるベルト駆動テスト ― 2012年09月16日 09時15分10秒
以前、ビクセンSP赤道儀の極軸体の極軸部分を切断して架台部分だけを改造してMARK-X赤道儀ベースモデルを取り付けるような工作をしました。
モータードライブはMARK-X標準の取り付け方法での対応も可能なのですが、組み上げたセットを眺めていると、もともとビクセンのSP赤道儀の架台部分にはMD-5やMT-1の取り付けができるような構造になっています。
見栄えと収まりの良さを考えるとこれを活用してみたくなりました。
平ギアで連結するのは嫌いなのでベルトでの連結を考えていて、鍋屋バイテックのサイトにたどり着きました。モーター軸が5φで微動軸が8φなので両方の中心径に対応した製品を選定。
モータードライブはMARK-X標準の取り付け方法での対応も可能なのですが、組み上げたセットを眺めていると、もともとビクセンのSP赤道儀の架台部分にはMD-5やMT-1の取り付けができるような構造になっています。
見栄えと収まりの良さを考えるとこれを活用してみたくなりました。
平ギアで連結するのは嫌いなのでベルトでの連結を考えていて、鍋屋バイテックのサイトにたどり着きました。モーター軸が5φで微動軸が8φなので両方の中心径に対応した製品を選定。

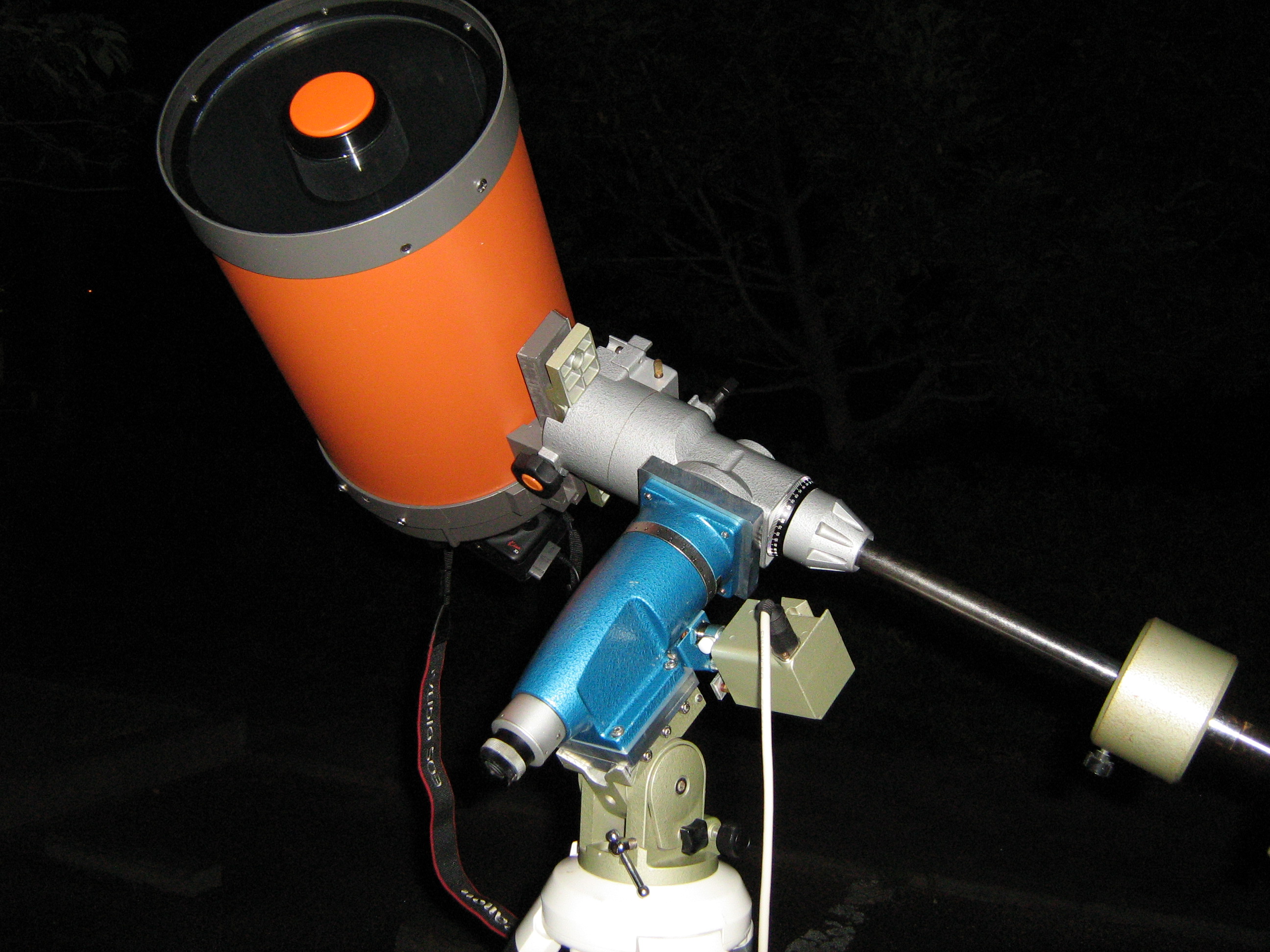
以下が仮に取り付けてみたところ。モーターはMD-5です。

テンションが強すぎたので、モーターの取り付けねじ穴を楕円に広げてテンションを軽くする。

以下はテスト撮影での状況です。コントローラは変換ケーブル経由でMARK-X用の自作コントローラを使っています。

以下はC8にF6.3レデューサを取り付けて(1260mm)、EOS Kiss X3直焦点で撮影したM42です。ISO800、120秒露出です。ピントが甘いというか使っているC8の問題で星像が点にならないのですが、一応追尾性能の目安として参考にしたいと思います。APS-Cでの焦点距離は2016mm相当です。

以下は上記の鏡筒を五藤光学EDアポ80mmF8.25(660mm)に取り替えて直焦点で撮影したM31です。EOS Kss X3,ISO800で240秒露出です。APS-Cでの焦点距離は35mm換算で1056mm相当です。拡大すると星がいびつに移動していますので機械的な問題はあるにしてもコントローラ追尾パルス精度とモーターの基本的なトルクには問題ないと判断して良いでしょう。

以下2012年11月10日追試。五藤光学EDアポ80mmF8.25(660mm)とOLYMPUS E-P2での直焦点撮影です。35mm換算で1320mm相当になります。ISO800,90秒露出です。特に流れていません。

E-P2での撮影の様子は以下。以下の写真での撮影対象物は月になっていますが、機器構成は全く同じです。

MT-1モータと自作コントローラでのMARK-X追尾テスト ― 2012年08月03日 03時42分03秒
ビクセンのMT-1モータを五藤光学マークX赤道儀に物理的に取り付けて自作のコントローラでの追尾テストです。
この日は北極星も確認できているので極軸は極軸望遠鏡による調整のみ行っています。実際の追尾での極軸の微調整までは行っていません。
月や星の写真撮影は以下すべて同じ条件です。
C8+F6.3レデューサ+EOS Kiss X3直焦点撮影。
35mm版カメラ換算で焦点距離は2016mmということになります。
ISO設定は月が200で星の写真は400になっています。
この日は北極星も確認できているので極軸は極軸望遠鏡による調整のみ行っています。実際の追尾での極軸の微調整までは行っていません。
月や星の写真撮影は以下すべて同じ条件です。
C8+F6.3レデューサ+EOS Kiss X3直焦点撮影。
35mm版カメラ換算で焦点距離は2016mmということになります。
ISO設定は月が200で星の写真は400になっています。
今回のテストの目的は以下です。
1.新機能である月時可変速テスト
※月時モードの初期設定は平均値ですがFASTスイッチを押すと恒星時比0.01%ずつ増速し、STOPスイッチを押すと0.01%ずつ減速する機能
2.恒星時駆動のテスト
●テスト1(月時可変速テスト)
まずは恒星時追尾モードでの月の写真。

10分間隔での撮影です。赤経方向だけでなく赤緯方向の移動も見られます。



次は平均月時追尾モードに設定。
一旦電源を切って、FASTスイッチとSTOPスイッチを押しながら電源投入すると初期値である平均月時:恒星時比96.35%に設定されます。

以下は平均月時追尾モードでの月の移動の写真。
この日の月については平均月時では遅れすぎのようです。



以下は平均月時追尾速度からFASTキーで増速設定操作を行った後の状況です。まだ完全ではありませんが赤経方向のずれの度合いは少なくなってきています。



●テスト2(恒星時追尾テスト)
以下の露出時間での写真はもっと短時間でも流れているものがありますので選別して状態の良いものを掲載します。
1260mm直焦点撮影(35mm版換算で2016mm)ではいろんな要因で流れます。
撮影結果により、基本的なモータードライブのトルクと追尾精度は確保できていると判断します。
木星:60秒露出。明るさ調整。

プレアデス付近:118秒露出。明るさ調整。

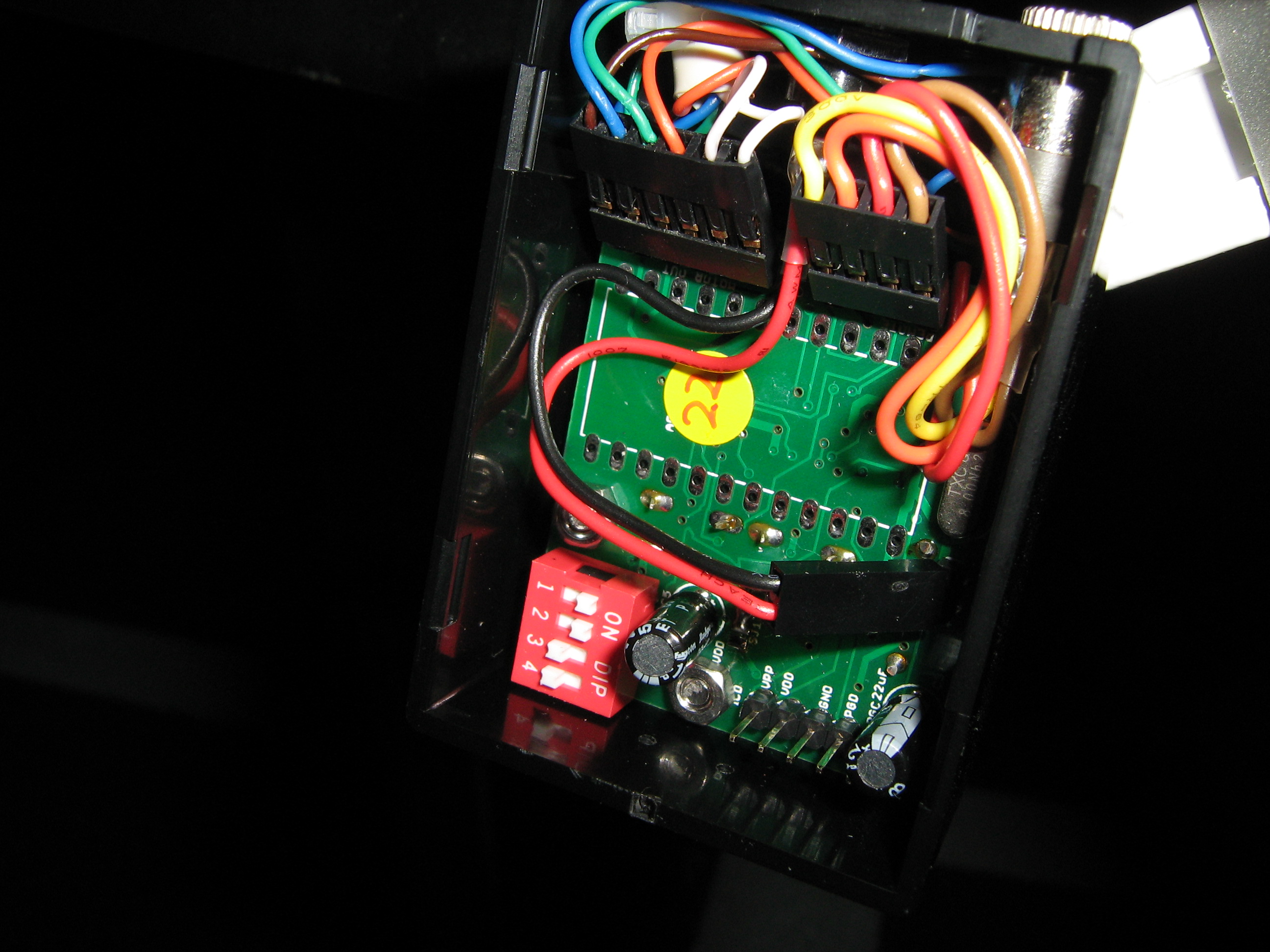
以下は月時テストで増速設定した最終的な値の確認の為にPICKit2に接続してデータを読み込んだ状態です。
EEPROMには月時モード時の恒星時を10000(100.00%)とした時の比率値を格納しています。
25EEという16進値がその値です。10進数に変換すると9710という値になります。つまり、恒星時比97.10%という設定になっているということです。これは撮影テストの後に更にFAST操作を行ったので撮影時点のものからは変わっています。
ソフトの上限設定値は9711ですのでほぼ上限の値ということになります。

自作MT-1用コントローラのGP赤道儀とC8での実機テスト ― 2012年07月31日 23時09分50秒
もともとは五藤光学MARK-X赤道儀用のモータードライブコントローラの開発が目的だったのですが、応用としてビクセンのMD-5モータおよびMT-1モータへの対応も行いました。
MD-5モータは仕様的に五藤光学などで採用しているステッピングモータの仕様とほとんど同じため、電源容量やトランジスタアレイの能力、モーターへの供給電源は同じ設計で動作させることができます。
MARK-X赤道儀のモータの相単位のコイル抵抗は100Ω~140Ωのモデルを確認しています。
MD-5モータは同様に100Ωです。
しかしながらMT-1モータはコイル抵抗が20Ωです。これは小型天体望遠鏡用のモータードライブで使うステッピングモータとしては異常に低抵抗設計であり、提供元の日本パルスモータの型番仕様としては「定電流駆動」モデルになっています。
300mA程度の電流を流す設計で内蔵のギアもMD-5の1/300から1/120になっています。
ギア比だけを見るとトルクは落ちるためその分のトルク不足を電流を多く流すことで補う目的と脱調しない範囲でのより高速回転を目指すためだったと思われます。
MD-5モータは仕様的に五藤光学などで採用しているステッピングモータの仕様とほとんど同じため、電源容量やトランジスタアレイの能力、モーターへの供給電源は同じ設計で動作させることができます。
MARK-X赤道儀のモータの相単位のコイル抵抗は100Ω~140Ωのモデルを確認しています。
MD-5モータは同様に100Ωです。
しかしながらMT-1モータはコイル抵抗が20Ωです。これは小型天体望遠鏡用のモータードライブで使うステッピングモータとしては異常に低抵抗設計であり、提供元の日本パルスモータの型番仕様としては「定電流駆動」モデルになっています。
300mA程度の電流を流す設計で内蔵のギアもMD-5の1/300から1/120になっています。
ギア比だけを見るとトルクは落ちるためその分のトルク不足を電流を多く流すことで補う目的と脱調しない範囲でのより高速回転を目指すためだったと思われます。
一般的な小型のモータードライブの回路構成を考えると従来のモデルの場合は電源電圧をそのままモータに供給することが出来るため電圧変換などを行う部品を経由することがなく、部品の発熱の問題や容量の問題は発生しません。
一方でMT-1モータに従来と同じように12Vなどの電圧を印加するとモータに電流が流れすぎてしまい、トランジスタアレイやモータが壊れる原因となります。
そこで3端子レギュレータで電圧を落として5Vや3Vの一定の電圧をモータに供給するか、定電流回路を組んで一定の電流を供給する設計を行うことになります。
このようにすると回路を構成する素子にモータに供給するための300mAなどの電流が流れることになり、従来は発熱することがなかったコントローラ基板上の部品が発熱することになります。
今回以下の二通りを実験しました。
1.もともとPICマイコン用に使っている5V変換用3端子レギュレータの容量を500mAのものから1Aに増強して5Vをモータの電源として供給するように回路を変更する。
2.従来方式の通り電源電圧をそのままモータ電源として使うが電流が流れすぎないように直列に抵抗を挿入する
1.の方式の場合、駆動そのものは問題ないのですが3端子レギュレータの発熱が非常に大きく、80℃以上の温度になりケース表面に出ているビスなどが触れないほど発熱することが確認できました。これでは実際に使うことは現実的ではありません。但し、電源電圧を9Vにすると3端子レギュレータの発熱は50℃程度だということが分かり電源電圧を12Vから9Vにすれば実用的になることがわかりましたが、個人的には12V電源が使えるほうが便利なのでこの方式での対応は却下しました。
2.の方式の場合、直列に接続した抵抗の発熱が大きいことが分かりました。51Ωの抵抗だと70℃以上の温度になることが確認できました。駆動トルク的には12V電源の時に抵抗値が20Ω+51Ω=71ΩとなりI=V/R=169mA流すことが出来、トルク的にも十分だと考えたのですがこれも却下です。
2.の方式でも直列につなぐ抵抗値として100Ωとすると電流値は12V電圧の時に100mAとなり発熱も50℃程度で実用になりました。問題は実際に追尾するトルクが得られているかということです。
そこで実際に重めの鏡筒であるC8をGP赤道儀に搭載して追尾テストを行いました。
結論としては16倍速での増速も含めて駆動トルクに実用上の問題は見られませんでした。
そこで3端子レギュレータで電圧を落として5Vや3Vの一定の電圧をモータに供給するか、定電流回路を組んで一定の電流を供給する設計を行うことになります。
このようにすると回路を構成する素子にモータに供給するための300mAなどの電流が流れることになり、従来は発熱することがなかったコントローラ基板上の部品が発熱することになります。
今回以下の二通りを実験しました。
1.もともとPICマイコン用に使っている5V変換用3端子レギュレータの容量を500mAのものから1Aに増強して5Vをモータの電源として供給するように回路を変更する。
2.従来方式の通り電源電圧をそのままモータ電源として使うが電流が流れすぎないように直列に抵抗を挿入する
1.の方式の場合、駆動そのものは問題ないのですが3端子レギュレータの発熱が非常に大きく、80℃以上の温度になりケース表面に出ているビスなどが触れないほど発熱することが確認できました。これでは実際に使うことは現実的ではありません。但し、電源電圧を9Vにすると3端子レギュレータの発熱は50℃程度だということが分かり電源電圧を12Vから9Vにすれば実用的になることがわかりましたが、個人的には12V電源が使えるほうが便利なのでこの方式での対応は却下しました。
2.の方式の場合、直列に接続した抵抗の発熱が大きいことが分かりました。51Ωの抵抗だと70℃以上の温度になることが確認できました。駆動トルク的には12V電源の時に抵抗値が20Ω+51Ω=71ΩとなりI=V/R=169mA流すことが出来、トルク的にも十分だと考えたのですがこれも却下です。
2.の方式でも直列につなぐ抵抗値として100Ωとすると電流値は12V電圧の時に100mAとなり発熱も50℃程度で実用になりました。問題は実際に追尾するトルクが得られているかということです。
そこで実際に重めの鏡筒であるC8をGP赤道儀に搭載して追尾テストを行いました。
結論としては16倍速での増速も含めて駆動トルクに実用上の問題は見られませんでした。

月時駆動のためにモードスイッチを「3」に設定。

月しか見えていないので月をレデューサをつけて直焦点で撮影してみる。


モータードライブコントローラ基板再修正 ― 2012年05月10日 00時51分32秒
モータードライブコントローラ基板は五藤光学MARK-X赤道儀用主体で考えているとは言っても、各社で使っているステッピングモータもそんなに違わないだろうという前提で設計していました。
ところが、ビクセン製のMT-1などで使っているステッピングモータの1相当りの抵抗値が20Ωと低くなっています。
対する五藤光学製のモータの中身は100Ωとか140Ωです。
これは電源電圧をそのままモータに供給するか電圧を下げたものをモーターに供給するかの違いによるものだと判断しました。
電圧が低い方が電流値は少なく出来ます。
多分ビクセンは3V程度をモーターに供給するつもりで20Ωのものを使っているのだと思います。
MT-1ではなくMD-5の場合は100Ωなので五藤光学と同様の考え方で大差ありません。電流値は変りますが概ねそのままの回路で使っても問題は出ません。
そこでMT-1に対応するために自作のモータードライブコントローラ基板でも3端子レギュレータで入力電圧を5Vに落としたものをジャンパによって切り替えてモーターに供給できるように回路変更して基板設計も変更しました。
MT-1に対応するためには3.3Vまで落とした方がいいとは思いますが、とりあえず5V系で実装してみます。3.3Vに落としたければ3端子レギュレータを交換すれば対応できます。※PICマイコン側の修正は必要になりますが。
3.3Vで20Ωの場合の1相当りの電流値は165mAで、5Vで20Ωの場合の電流値は250mAです。但し、ビクセンのオリジナルは2-2相励磁(だと思われる)でこちらは1-2相励磁なので実動作時の電流値は2/3になって、少し多め程度で納まる予定です。
そんなわけで設計変更した結果の基板イメージは以下のような感じ。

FusionPCB向けのデータをViewPlotで取り込んだイメージは以下。

最後にFusionPCBへの注文内容の確認メールの引用は以下。
よくFusionPCBは注文番号をシルクに入れないとだめだとか言われていますが、今回の注文ではあえて注文番号をシルクに入れるなどということはやっていません。
> Thanks for shopping with us today!
> The following are the details of your order.
> ------------------------------------------------------
> Order Number: 50698
> Date Ordered: Wednesday 09 May, 2012
> Detailed Invoice:
>
> Products
> ------------------------------------------------------
> 1 x Fusion PCB Service (PCB08511P) = $9.90
> Layer 2
> PCB Thickness 1.6mm
> PCB Dimension 5cm Max*5cm Max
> PCB Color Green
> Surface Finish Hasl
> E-Test 50% E-test
> PCB Qty. 10
>
> ------------------------------------------------------
> Sub-Total: $9.90
> Registered Air Parcel (Weight: 0.08 KG.Delivery Time: 10-30 Days): $4.10
> Total: $14.00
EAGLEでのシルク印刷編集 ― 2012年02月12日 10時14分28秒
EAGLEで回路設計、基板設計をしてP板.comに基板製造を依頼したことがあります。その時はシルク印刷をどうしていいのかが分からず、結局シルク印刷なしで発注してしまいました。
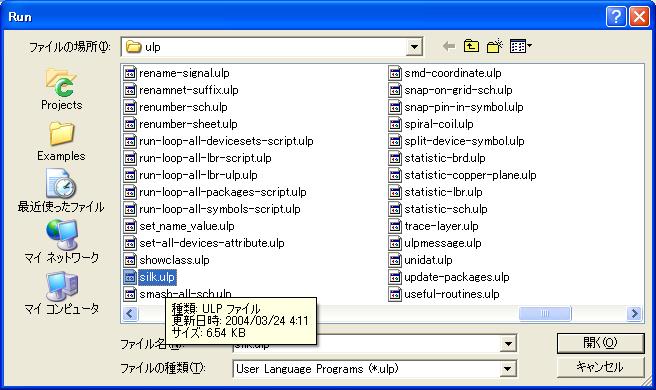
たまたま、他のサイトの記事でulpフォルダにツールを追加するという説明をみてそのツールを追加操作したときにフォルダの中身を見たのをきっかけとして[silk.ulp]なるファイルがあるのに気付きました。
これ、実行してみると以下のことを行っているようです。
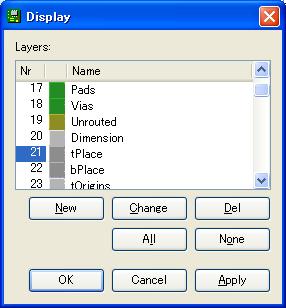
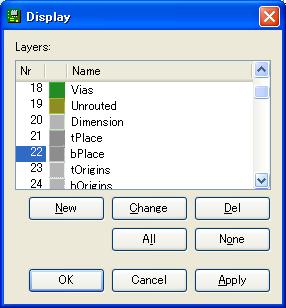
1.tPlaceレイヤのデータを_tplaceレイヤにコピーして色を黄色くする
2.bPlaceレイヤのデータを_bplaceレイヤにコピーして色を黄色くする
tPlace、bPlaceレイヤは部品ライブラリから配置した部品データの外形データを貼り付けているレイヤのようです。このレイヤは元から存在しているようです。tPlaceが表面。bPlaceが裏面です。
※以降[t]は表面、[b]は裏面のデータということで説明は省略します。
もともと配置した部品の属性は回路図上で部品名や端子名が対応付けられていて、基板データ上のデータとしてはtNames/bNames/tValues/bValesとして表示されるようになっています。
EAGLEのレイヤの説明はこちらもご参照ください。
これらが全てシルク印刷イメージとして「自動配置」されれば特に苦労はないのですが、基板からはみ出たりするのでそのまま使うことはできません。
つまり、部品名などは自分で描く必要があったわけです。
今回実施した手順は整理すると以下になります。
(a) [silk.ulp]を実行(もともとEAGLE5.11.0に入っていました)
(b) _tplaceレイヤで部品名やオリジナルの文字列を追加
(c) _bplaceレイヤで部品名やオリジナルの文字列を追加
(d) P板.comで提供されている[gerb274x[4L].cam]を使ってCAM Processor実行
(e) [Silk screen CMP]タブで対象レイヤがtPlaceになっているのを_tplaceに変更
(f) [Silk screen SOL]タブで対象レイヤがbPlaceになっているのを_bplaceに変更
以下、[silk.ulp]を実行

tPlaceレイヤ表示は以下の状態

bPlaceレイヤは以下の状態

[silk.ulp]を実行直後の_tplaceレイヤの状態は以下。単なるtPlaceレイヤのコピーだということが分かる


[silk.ulp]を実行直後の_bplaceレイヤの状態は以下。同様に単なるコピー。


以下は表面のシルク印刷レイヤとして_tplaceレイヤに文字などを追加したところ

同様に裏面のシルク印刷レイヤとして_bplaceレイヤに文字などを追加したところ

全レイヤ表示状態

最近のコメント